


SMBus 2.0 specification
SMBus 2.0 specification: http://smbus.org/specs/smbus20.pdf
The following figure is taken from the SMBus 2.0 specification, Page 11, Figure 3-1: SMBus timing measurements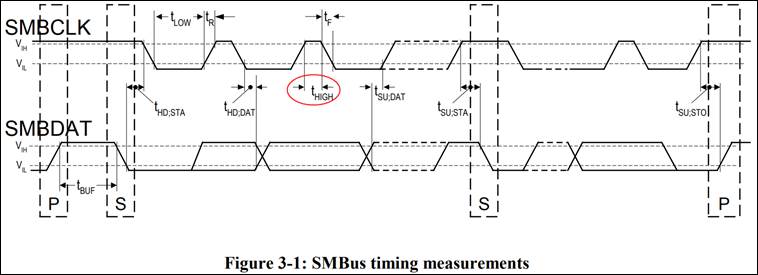 The following figure is taken from the SMBus 2.0 specification, Page 13, Figure 3-2: Timeout measurement intervals
The following figure is taken from the SMBus 2.0 specification, Page 13, Figure 3-2: Timeout measurement intervals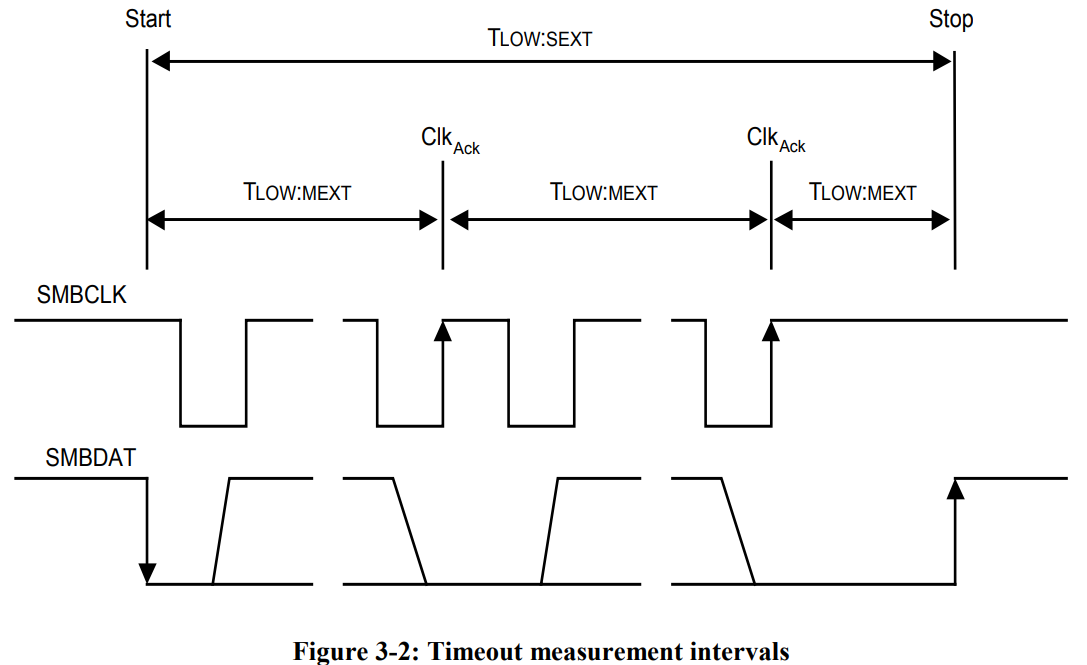
The following table is extracted from the SMBus 2.0 specification, Page 11, Table 1: SMBus AC specifications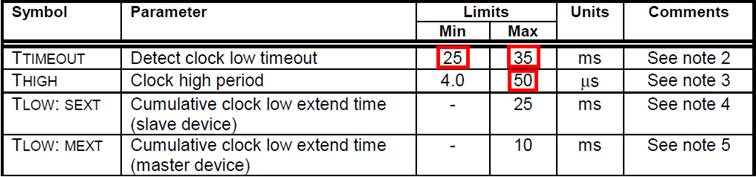
UCD31xx Digital Power Supply Controller - PMBus Interface/I2C Interface
File Title: UCD31xx Digital Power Supply Controller, Literature Number: SNIU028D FEBRUARY 2016 – REVISED SEPTEMBER 2020
File URL: https://www.ti.com/lit/ug/sniu028d/sniu028d.pdf
The picture below is a screenshot from the description of the file content (Page. 386), Clock High Timeout Detection
The following figure is a screenshot from the description of the file content (Page. 419), Table 10-7. PMBus Status Register (PMBST) Register Field Descriptions (continued)
Question
Hello Experts,
- Does the function of CLK_LOW_TIMEOUT correspond to the TTIMEOUT specification in the SMBus 2.0 specification?
And please explain CLK_LOW_TIMEOUT detection working principle. - TLOW:SEXT, and TLOW:MEXT in the SMBus 2.0 specification. Is there any corresponding function support in the UCD3138?
And please explain detection working principle. - In the document file, (Page. 386) and (Page. 419), why are the units of Clock High Timeout Detection different?
Thank you very much for your reading and answer.


