Other Parts Discussed in Thread: EV2400,
Hello, TI Experts,
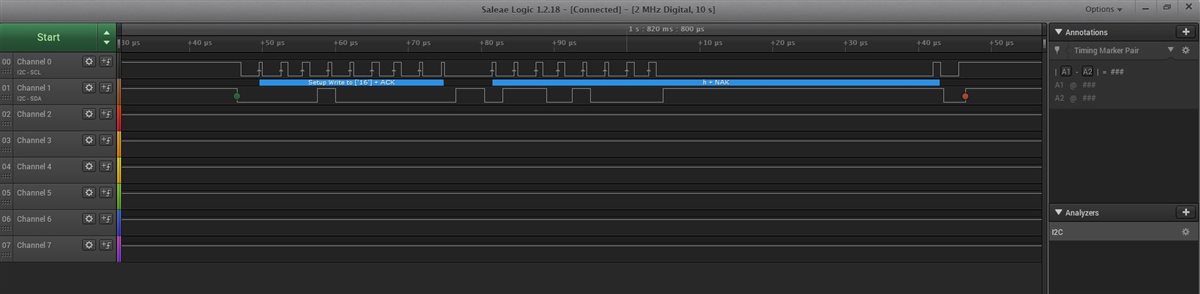
We have a custom board and there is a MCU that can communicate with IC via I2C. In the first communication with the IC we often get timeout errors (NO ACK). However the communication is successful afterwards. But it still does not mean that the system is communicating in a healthy way. Because we keep logs with the MCU (Stm32F0xxx) and we observed that communication errors are repeated in these logs. The images regarding the error we experienced when we first communicated with the IC are as follows.
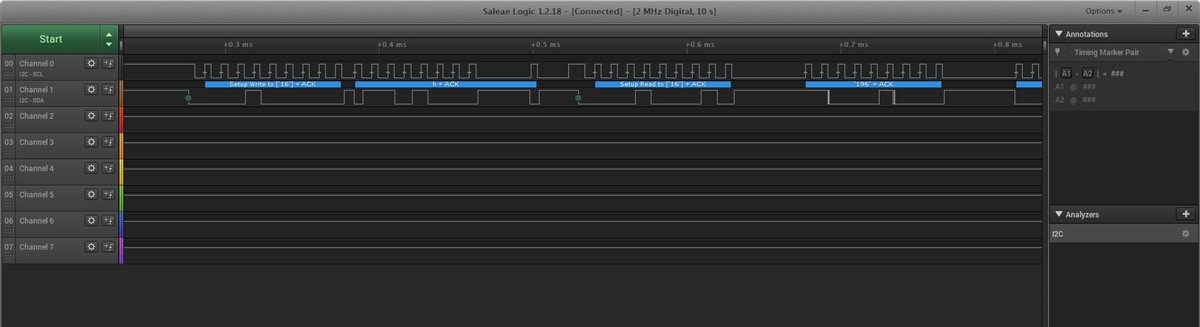
Error-free communication on the same data
We also have standalone board (NOT EVM) and we kept log with EV2400. We observed failures in communication there. Some rows (like temp, Cell 1 voltage etc.) was missing.
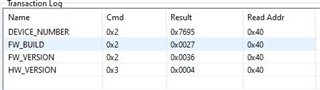
Some information about IC,