


Other Parts Discussed in Thread: AM2434
Hi there,
I have problems with DC-Sync on AM64x EVM board with ethercat_slave_simple_demo_am64x-evm_r5fss0-0_freertos_ti-arm-clang example. SDK version Industrial Communications SDK 09.00.00.03
Following setup:
- running application on R50-1 core
- cable connected to EtherCAT IN/Port0
- created a PLC-Task in Twincat with 1000 us cycle time
- linked PLC-Task variable to TX-Process data
- activated Sync0 with 1000 us cycle time
- running TwinCAT in Config mode
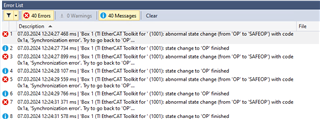
After a few minutes (or sometimes even just seconds) I get the AL Status Code '0x001a - Synchronization error'. The Subdevice then switches into SAFEOP mode and sometimes cannot recover back to OP.
What I found out is, that this error only seems to occur if the FreeRun Cycle set under EtherCAT Master -> Adapter -> FreeRun Cycle (ms) does not match the set SYNC0 frequency. This behavior is not what I know from other EtherCAT devices, there the DC-SYNC mode works also in Config mode without adjusting FreeRun Cylce time. For higher DC-SYNC frequencies this is also not possible as the lowest I can get with FreeRun Cylce time is 1ms.
Is this by design that DC-Sync is not properly supported in config mode or is there a problem with the Stack?
I can reproduce this with two different Windows-PC running as TwinCAT master.
PS: the same error occured on a custom AM2434 board, I just reproduced with AM64x EVM

