Part Number: AM5748
Hi,
we are trying to implement the I2C communication to communicate with slave device without I2C engine (via bit banging). Currently we could able to achieve it, but the GPIO toggling latency is high. As we could able to achieve upto 32kHz frequency, but we are expecting to achieve at least 2 MHz frequency.
The ARM core is booted with Linux and using below API's in user space to toggle the GPIO's,
int gpioValue = open(gpioPath, O_WRONLY);
write(gpioValue, state, 1);
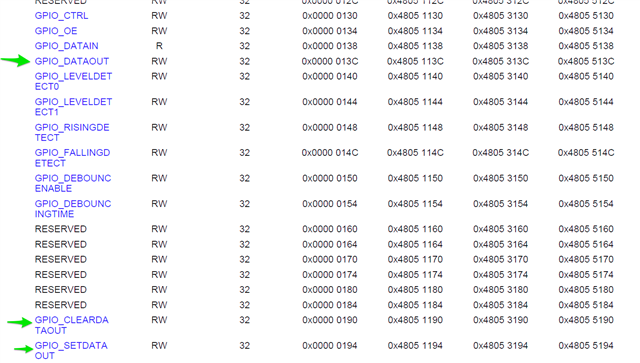
Please kindly provide the proper guidelines to achieve the GPIO toggling speed till 2MHz
Thanks,
Srinidhi H