Part Number: TDA3XEVM
i don't know how dcan's lib is used. (dcan's lib -> utils_dcan.c, utils_dcan.h, system_dcan.c)
i made a code in
/** \brief Used for enabling board-to-board DCAN */
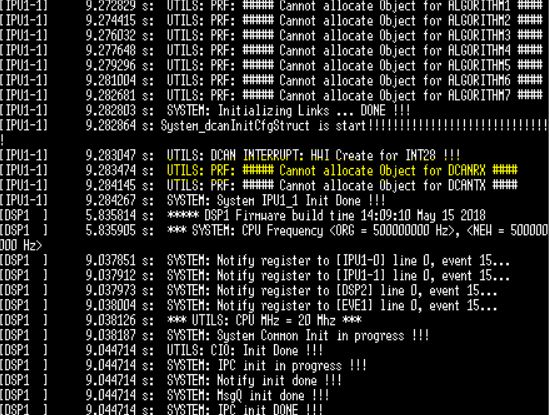
#define ENABLE_B2B_DCAN_TEST (1U)
but dcan do not work.
if anyone knows on dcan, please help me.. OR give me the example and your code.
Thank you.