Hi
DSP: c6678
CCS: v7
OS: win 7
MCSDK: 2.0.2.6
I modified an IPC example and I could send and receive data between Core1 and Core0.
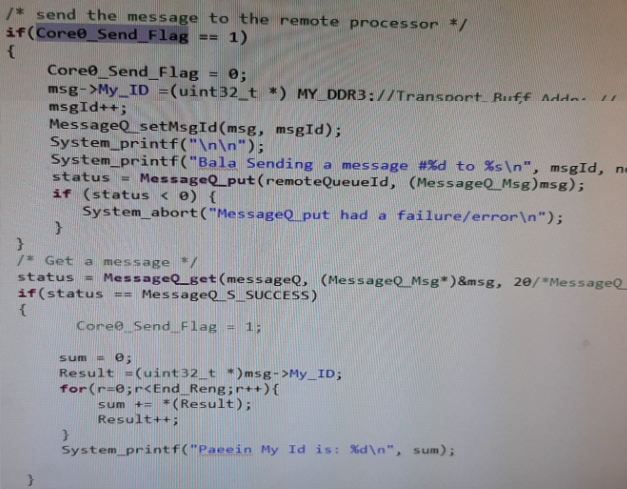
Today, I added a flag in the send function (MessageQ_put()) IPC thread in Core0, because I want to control the IPC sending function by Processing thread(in the processing thread set the flag TRUE).
When I run the code my program aborted and a message printed in the console as below:

Why did this problem happen? how can I solve it?
Best Regards