Other Parts Discussed in Thread: AWR1243, MMWAVE-STUDIO, TIDEP-01012
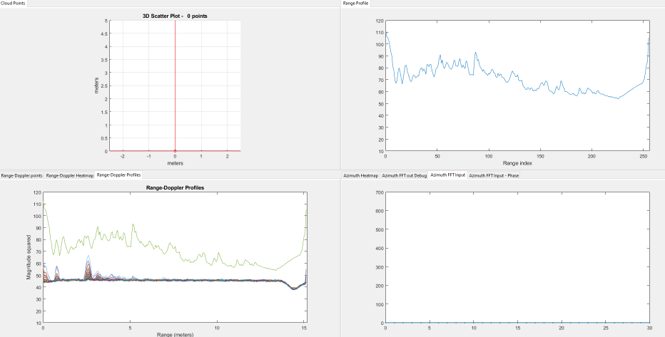
For the usecase "AWR1243 Capture + Radar Object Detect..." I have the demo running on the EVM. However in the MATLAB output to "Texas Instruments - Cascade demo" display, the "Azimuth Heatmap" and all the other Azimuth taps in that display quadrant - do not show any data. In the uart interface I have tried all the combinations of 1/0 in the "GUI Control" without getting any azimuth results'.
What do I need to do to see the Azimuth results?
Thank you,
Zach