Other Parts Discussed in Thread: AM5718
I am using the TI's AM5718 Soc for developing the cv project, while i am using the opencv3.1.0,the opencl support for opencv is not completely. I could find out the opencl's device by opencv-ocl code, while i use the device to processing the image,it tell me the device isn't setting up!Here the opencv-ocl code and the result of it! I want to know, how can i eable the DSP accelerate to be my opencl deivice and use it.
#include <iostream>
#include "opencv2/opencv.hpp"
#include "opencv2/core/ocl.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/videoio/videoio.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace std;
using namespace cv;
using namespace cv::ocl;
#define DSP 1
int main()
{
double t = 0.0;
std::vector<cv::ocl::PlatformInfo> plats;
cv::ocl::getPlatfomsInfo(plats);
const cv::ocl::PlatformInfo *platform = &plats[0];
cout << "Platform Name:" << platform->name().c_str() << endl;
cv::ocl::Device c_dev;
platform->getDevice(c_dev,0);
cout << "Device name:" << c_dev.name().c_str() << endl;
c_dev.set(0);
cv::ocl::setUseOpenCL(true);
#if DSP
cv::UMat Ori = cv::imread("/home/root/test.jpg").getUMat(cv::ACCESS_RW),Res;
cout << "Use the OpenCL Deivice?" << cv::ocl::useOpenCL() << endl;
t = (double)cv::getTickCount();
cv::cvtColor(Ori,Res,cv::COLOR_RGB2GRAY);
t = ((double)cv::getTickCount() - t) / cv::getTickFrequency();
std::cout << "TI AM57x Accelerate Time Cost:" << t << "s" << std::endl;
cv::imshow("Test",Ori);
cv::imshow("Gray",Res);
#else
Mat I = imread("/home/root/test.jpg"),gray;
t = (double)cv::getTickCount();
cv::cvtColor(I,gray,cv::COLOR_RGB2GRAY);
t = ((double)cv::getTickCount() - t) / cv::getTickFrequency();
std::cout << "CPU Time Cost:" << t << "s" << std::endl;
cv::imshow("Ori",I);
cv::imshow("Res",gray);
#endif
for (;;)
{
int key = waitKey();
if (key == 27/*ESC*/ || key == 'q' || key == 'Q')
break;
}
return 0;
}
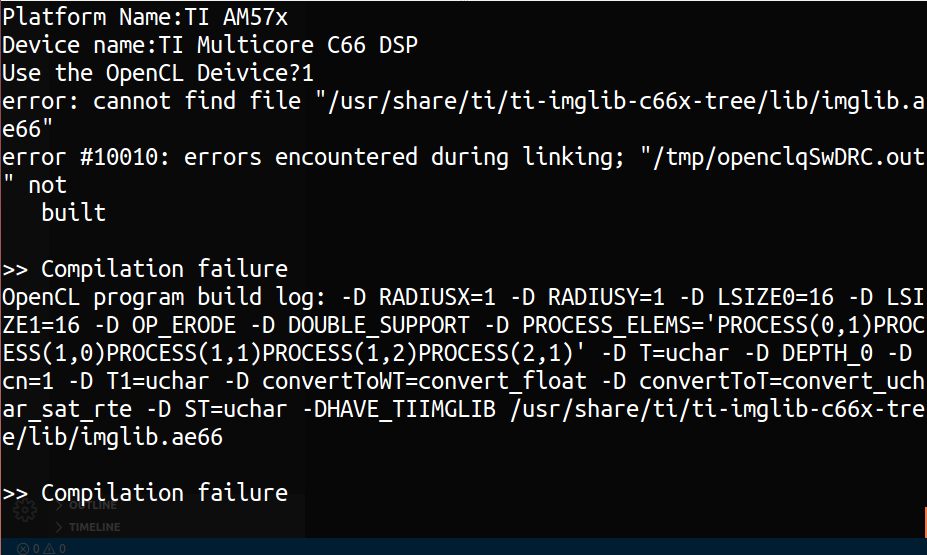
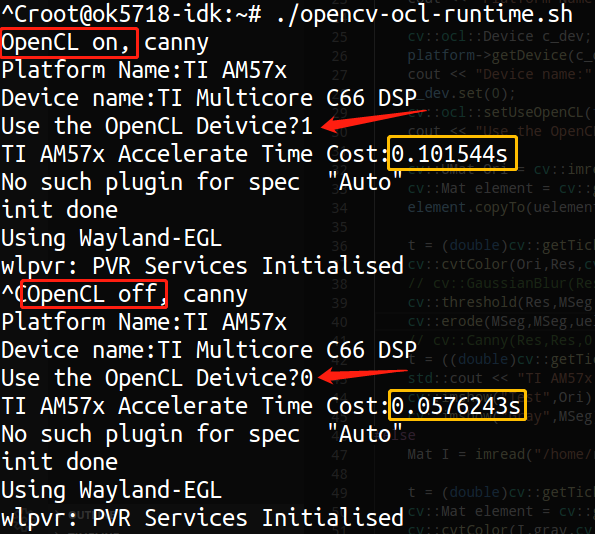
The result:
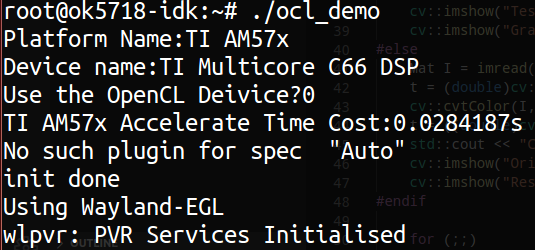
The Use the OpenCL Device?Show that the DSP Accelerate is not being using as a opencl device.
I want to know whether the opencv-ocl library can support the dsp to be a opencl-device?
Look forward to your reply,thanks!