Hello, TI experts;
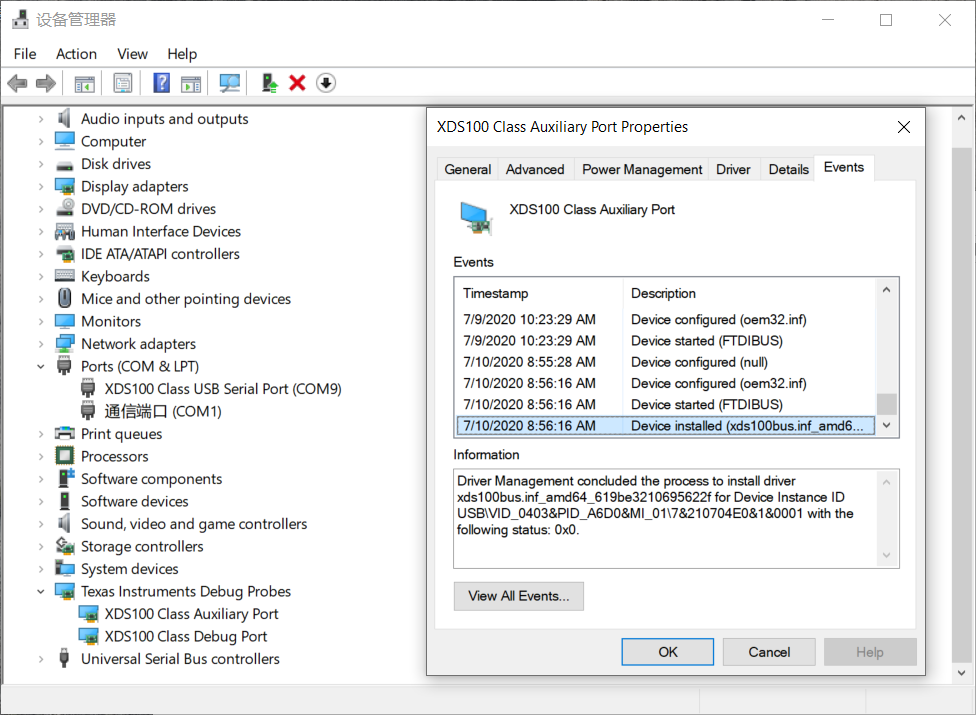
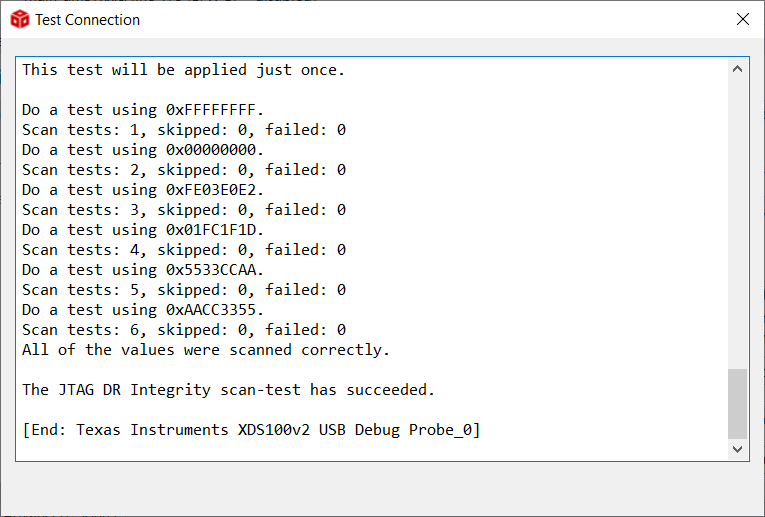
I use IDK574x. When I use the SD card to run the PDK program, if the debug serial port is not plugged in, the program will run normally. When I plug in the debug serial port, the program will terminate and the development board will shut down. But the VID and PID of XDS100v2 are correct, I can connect to A15 core on CCS. I don't know if XDS100v2 is incompatible with Windows 10. When I run the program on the SD card, plugging in the debug serial port will cause the program to terminate.
I don't know if you have encountered this kind of problem. If you can help me, I would appreciate it!

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.