Other Parts Discussed in Thread: IWR6843
Hi Teams,
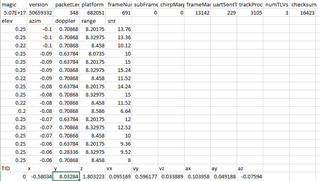
I found that the IWR6843 ISK report on Y value always LESS than 7 meter even be configed by the configuration file for 14 meter
The working lab is based on the Tool Version as followings,
- CCS 8.3.1
- SDK 3.5.0.4
- Industrial Tool 4.7.0
- Lab: People Counting
- Config: IWR6843 ISK 14 m (based on TI configuration file)
Regards,
Kevin