Other Parts Discussed in Thread: AWR1843
Hi,I found a similar phenomenon.
Environment:
1). AWR1843 EVB
2).lab0007_medium_range_radar(USRR subframe only)
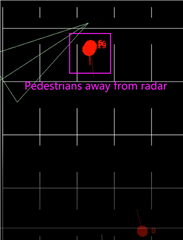
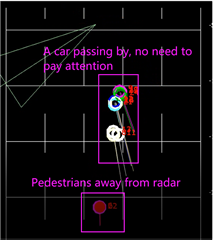
We used pedestrians as obstacles to test in the open area outdoors, and pedestrians walked back and forth in front of the radar.and the angle difference of the target detected is around 3° between the pedestrian is far away from the radar and the pedestrian approaches the radar.
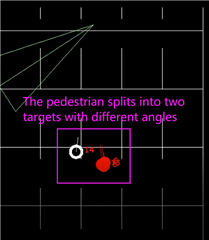
There is another problem at the same time,the approaching pedestrian is divided into two targets with great height difference (for example, at a distance of 15m from the radar, the height of one target is greater than 1.5m, and the height of the other target is less than - 1.5m), and the horizontal angle difference between the two targets is about 10 °
But we didn't find this problem when we only used MRR subframe。