


Hello,
We made a design using the recommendations in the TUSS4470 datasheet but the ringing is too high. We use a ProWave 400EP14D ultrasound sensor which can both emit and detect.
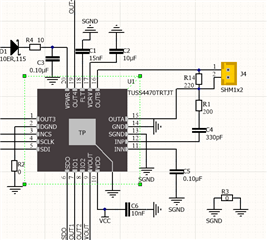
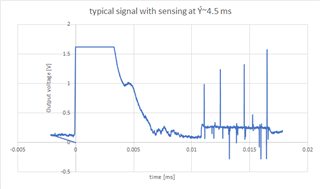
We use maximum amplifications as our signal is very weak. We use the analog output and make our own discrimination. However, the output is saturated up to ~3 ms and then decreases roughly linearly to 0 in another 3 ms. (in the above graph the signal is limited by the oscilloscope to 1.6V. We tried to change the number of pulses from 20 down to 8 without any change in the first peak. The excitation voltage is set to 20V. On the above graph you can see the signal coming back from the object just below 5 ms. We would like to be able to detect objects at ~25-30 cm which means below 2 ms. How can we improve our design?
