


Hello,
I am using DCA1000+IWR6843ISK+MMWAVEBOOST boards and mmwave studio to collect raw data.
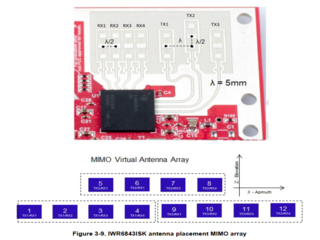
Radar Configuration : enabled 3 Tx and 4 Rx with BPM MIMO. So, 12 virtual antennas.
I am trying to calculate the Azimuth and Elevation angle using Barlett and MUSIC methods. To do that first need to make sure about the Steering vercor formula.
I have 2 questions,
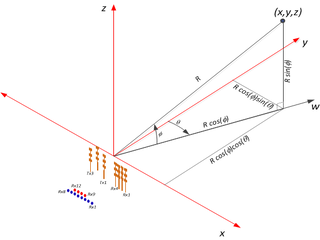
- According to my understanding The steering vector calculation should be like this,
steeringVector = e^(-1*pi*(dx*sin(azimuth)*cos(elevation) + dy*cos(azimuth)*cos(elevation))) where, -60<=azimuth<=60 and -15<=elevation<=15,
and array_dx = [0 1/2 1 3/2 1 3/2 2 5/2 2 5/2 3 7/2]; // This is based on the ordering of below image. Just followed the oder of the virtual antennas in the image.
array_dy = [0 0 0 0 1/2 1/2 1/2 1/2 0 0 0 0]; // Same here, following the virtual antenna array position in the image below.
Is this correct?
- I am considering 12 virtual antennas to calculate this steering vector. Is it the correct way? Or should I consider only 8 vistual antennas which are no, [3,4,5,6,7,8,9,10]? Or something else? I am calculating based on these 2 images. The images are below.
I look forward to your reply.
Thank you.
Best regards,
Nazmul


