


Other Parts Discussed in Thread: MMWAVE-SDK
Hi,
I'm using IWR6843ISK with OOB demo in SDK 3.5
I tested it below.
the sensor by fix at a sufficient height(to prevent reflections on the ground), and move it back and front.
and target is 3 poles standing side by side.

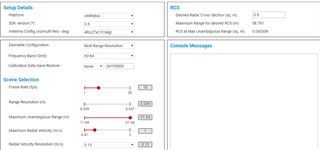
below is my config
% *************************************************************** % Created for SDK ver:03.05 % Created using Visualizer ver:3.5.0.0 % Frequency:60 % Platform:xWR68xx % Scene Classifier:best_range_res % Azimuth Resolution(deg):15 % Range Resolution(m):0.039 % Maximum unambiguous Range(m):31.94 % Maximum Radial Velocity(m/s):1 % Radial velocity resolution(m/s):0.13 % Frame Duration(msec):100 % RF calibration data:None % Range Detection Threshold (dB):15 % Doppler Detection Threshold (dB):15 % Range Peak Grouping:enabled % Doppler Peak Grouping:enabled % Static clutter removal:disabled % Angle of Arrival FoV: Full FoV % Range FoV: Full FoV % Doppler FoV: Full FoV % *************************************************************** sensorStop flushCfg dfeDataOutputMode 1 channelCfg 15 5 0 adcCfg 2 1 adcbufCfg -1 0 1 1 1 profileCfg 0 60 425 7 200 0 0 20 1 1008 5250 0 0 158 chirpCfg 0 0 0 0 0 0 0 1 chirpCfg 1 1 0 0 0 0 0 4 frameCfg 0 1 16 0 100 1 0 lowPower 0 0 guiMonitor -1 1 1 0 0 0 1 cfarCfg -1 0 2 8 4 3 0 15 1 cfarCfg -1 1 0 4 2 3 1 15 1 multiObjBeamForming -1 1 0.5 clutterRemoval -1 0 calibDcRangeSig -1 0 -5 8 256 extendedMaxVelocity -1 0 bpmCfg -1 0 0 1 lvdsStreamCfg -1 0 0 0 compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 measureRangeBiasAndRxChanPhase 0 1.5 0.2 CQRxSatMonitor 0 3 19 125 0 CQSigImgMonitor 0 125 16 analogMonitor 0 0 aoaFovCfg -1 -90 90 -90 90 cfarFovCfg -1 0 0 31.50 cfarFovCfg -1 1 -1 1.00 calibData 0 0 0 sensorStart
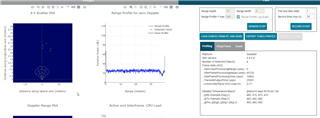
Q1. When moving, the object is detected, but the Rx power of the range profile is not detected. (left picture)
But when stopped, the Rx power of the range profile is detected. (right picture)


Why is the Rx power of the range profile not detected when moving?
Q2. When moving, It is frequently occur detected objects are separation.
below is when approaching the target. In order, normal(left), starting to separate(middle), separated(right).


How can I prevent that?
+) Q3. Where is the frame number of the output packet in the visualizer?
Thanks.


