Other Parts Discussed in Thread: MMWAVEICBOOST,
Hi,
I'm use IWR6843ISK + MMWAVEICBOOST with SDK 3.5 and PCAN-USB FD.
I want to transmit periodically collected data(by I2C) simply using CAN-FD.
I used the CAN-FD Driver example source. (SOC Clock set, CAN-FD Initialize, etc)
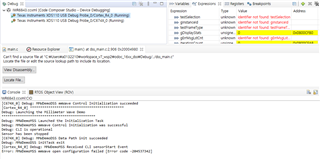
When transmit periodically, It occur transmit error.
Below is error info and source code.

retVal = CANFD_transmitData (txMsgObjHandle, msgId, CANFD_MCANFrameType_FD, MCAN_APP_TEST_DATA_SIZE, &txData[0], &errCode);
Task_sleep(5U);
iterationCount++;
if (retVal < 0)
{
System_printf ("Error: CANFD transmit data for failed [Error code %d]\n", errCode);
System_printf("Debug: Number of iterations : %d\n", iterationCount);
System_printf("Debug: Number of messages transmitted : %d\n", gTxPkts);
System_printf("Debug: Number of messages received : %d\n", gRxPkts);
System_printf("Debug: Error Status Interrupt : %d\n", gErrStatusInt);
System_printf("Debug: Error Reason : %d\n", gErrorReason);
System_printf("\n\n");
msgObjStats.handle = txMsgObjHandle;
optionTLV.type = CANFD_Option_MCAN_MSG_OBJECT_STATS;
optionTLV.length = sizeof(CANFD_MCANMsgObjectStats);
optionTLV.value = (void*) &msgObjStats;
retVal = CANFD_getOptions(canHandle, &optionTLV, &errCode);
if (retVal < 0)
{
System_printf ("Error: CANFD get stats failed [Error code %d]\n", errCode);
}
System_printf("Debug: Message Identifier : 0x%x\n", msgObjStats.startMsgIdentifier);
System_printf("Debug: Direction : %s\n", (msgObjStats.direction == 0) ? "Receive" : "Transmit");
System_printf("Debug: Number of interrupts received : %d\n", msgObjStats.interruptsRxed);
System_printf("Debug: Number of messages processed : %d\n", msgObjStats.messageProcessed);
System_printf("\n\n");
optionTLV.type = CANFD_Option_MCAN_ERROR_COUNTER;
optionTLV.length = sizeof(CANFD_MCANErrCntStatus);
optionTLV.value = (void*) &errCounter;
retVal = CANFD_getOptions(canHandle, &optionTLV, &errCode);
if (retVal < 0)
{
System_printf ("Error: CANFD get error counter failed [Error code %d]\n", errCode);
}
System_printf("Debug: Receive passive status : %d\n", errCounter.rpStatus);
System_printf("Debug: Transmit Error Counter : %d\n", errCounter.transErrLogCnt);
System_printf("Debug: Receive Error Counter : %d\n", errCounter.recErrCnt);
System_printf("Debug: Error Logging Counter : %d\n", errCounter.canErrLogCnt);
System_printf("\n\n");
optionTLV.type = CANFD_Option_MCAN_PROTOCOL_STATUS;
optionTLV.length = sizeof(CANFD_MCANProtocolStatus);
optionTLV.value = (void*) &protoStatus;
retVal = CANFD_getOptions(canHandle, &optionTLV, &errCode);
if (retVal < 0)
{
System_printf ("Error: CANFD get protocol status failed [Error code %d]\n", errCode);
}
System_printf("Debug: LEC : %d\n", protoStatus.lastErrCode);
System_printf("Debug: Activity : %d\n", protoStatus.act);
System_printf("Debug: Error Passive : %d\n", protoStatus.errPassive);
System_printf("Debug: Warning Status : %d\n", protoStatus.warningStatus);
System_printf("Debug: Bus Off Status : %d\n", protoStatus.busOffStatus);
System_printf("Debug: Data Phase LEC : %d\n", protoStatus.dlec);
System_printf("Debug: Rx ESI flag : %d\n", protoStatus.resi);
System_printf("Debug: Rx BRS flag : %d\n", protoStatus.rbrs);
System_printf("Debug: Rx CAN FD : %d\n", protoStatus.rfdf);
System_printf("Debug: Protocol Exception Event : %d\n", protoStatus.pxe);
System_printf("Debug: TDC value : %d\n", protoStatus.tdcv);
System_printf("\n\n");
}
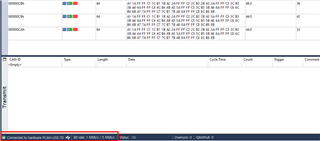
Below is receive and trace info in PCAN-View.

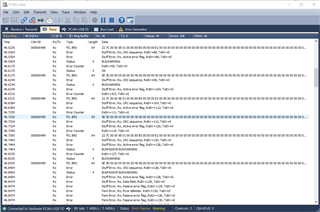
It occur stuff error and form error.
Any advice on why get this errors?
Thanks.