Hi,
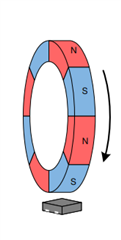
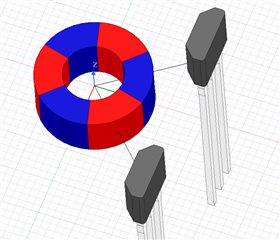
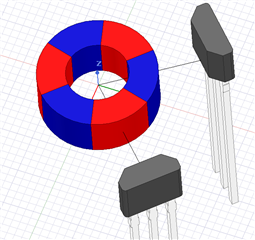
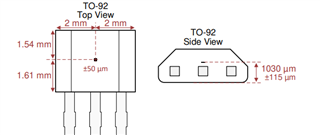
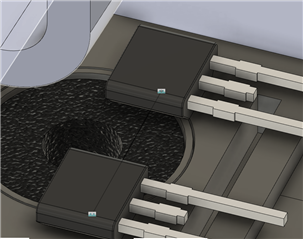
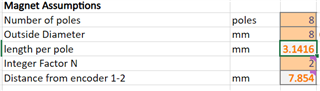
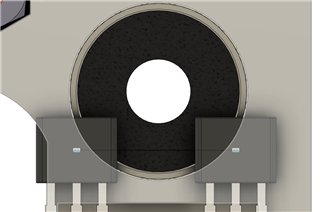
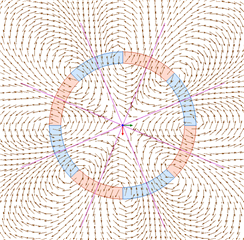
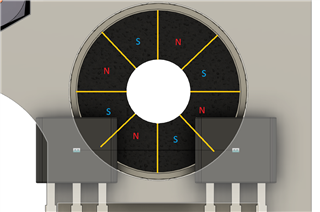
We are using a 6 pole magnet and we are using 2 DRV5011's below it. I created a drawing to simulate the design shown below. The drawing shows a 6 pole magnet with the poles 60 degrees apart and then a surface below the magnet that is 2.6mm( This is where the sensor will rest). There is an off set of 1mm which is the height of the sensor inside of the through hole package.
I am able to calculate a sensor to sensor distance of ~11mm. This is if we project the pole to where we expect the sensor to be.
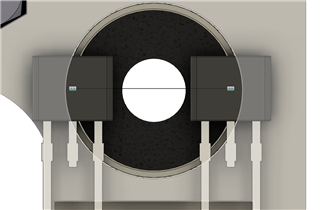
When placed like this and tested, it does not give a quadrature output.
1. Is there something wrong with the logic in the design?
2. Do both magnets need to be symmetrical about the center of the magnet?