


The actual Angle of the sensor is not facing straight forward, but turned θ degrees horizontally. But I need the output coordinates are unturned.
It works like this:
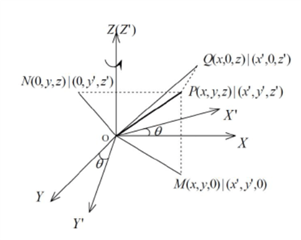
How to modify the program in MRR, change the Angle of the point.
Thank you
Charles.
The actual Angle of the sensor is not facing straight forward, but turned θ degrees horizontally. But I need the output coordinates are unturned.
It works like this:
How to modify the program in MRR, change the Angle of the point.
Thank you
Charles.
