I would like to run two IWR6843ISK's REV D's running the People Counting Binary from Industrial Toolbox Version 4.8.0 at the same time.
However, whenever I plug the second IWR6843ISK into the computer while running the mmWave People Counting demo, I immediately get the following error:
Traceback (most recent call last): File "gui_threads.py", line 26, in run File "oob_parser.py", line 801, in readAndParseUart File "serial\serialwin32.py", line 275, in read serial.serialutil.SerialException: ClearCommError failed (PermissionError(13, 'Access is denied.', None, 5))
If I try to start either unit while both are plugged in, I also get the same error.
Should it be feasible to gather both IWR6843ISK's streams at the same time?
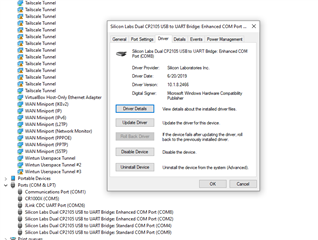
Here is a picture of the device manager with everything plugged in