


Other Parts Discussed in Thread: UNIFLASH, AWR1843
Dear E2E community,
I am using the AWR1843BOOST board to evaluate its performance as an on-board drone (quadcopter) radar solution. For the test purposes the board is attached to the drone frame facing forward in the flight direction (slightly inclined by 10° upwards). The drone then multiple times was guided to intercept a static hovering DJI Phantom 4 drone. The DJI drone was detected by radar, but after plotting the logged data, it was often observed that the detected drone in some frames "splits" in two separately detected objects, while the real target should be a point in the middle between those 2 detections, please refer to plots below:
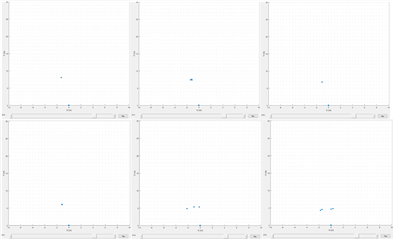
Up to frame 3314 the drone is detected correctly, but then it splits in separate points and in frame 3315 two clusters of 2 points each are detected, while actually the drone should be in the middle. There have been similar issues also at up to 10 meter ranges. Here is also a log with with detected object coordinates + velocity:

And those are the radar config parameters used (data captured over UART). The parameters have not been tuned much specifically, so perhaps the issue lies there:
% ***************************************************************
% Created for SDK ver:03.02
% Created using Visualizer ver:3.5.0.0
% Frequency:77
% Platform:xWR18xx
% Scene Classifier:best_range_res
% Azimuth Resolution(deg):15
% Range Resolution(m):0.039
% Maximum unambiguous Range(m):31.44
% Maximum Radial Velocity(m/s):2.5
% Radial velocity resolution(m/s):0.04
% Frame Duration(msec):100
% RF calibration data:None
% Range Detection Threshold (dB):15
% Doppler Detection Threshold (dB):15
% Range Peak Grouping:enabled
% Doppler Peak Grouping:enabled
% Static clutter removal:disabled
% Angle of Arrival FoV: Full FoV
% Range FoV: Full FoV
% Doppler FoV: Full FoV
% ***************************************************************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 5 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
profileCfg 0 77 6 7 200 0 0 20 1 992 5166 0 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 4
frameCfg 0 1 16 0 100 1 0
lowPower 0 0
guiMonitor -1 1 1 0 0 0 1
cfarCfg -1 0 2 8 4 3 0 15 1
cfarCfg -1 1 0 8 4 4 1 15 1
multiObjBeamForming -1 1 0.5
clutterRemoval -1 0
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 0
lvdsStreamCfg -1 0 0 0
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
CQRxSatMonitor 0 3 19 125 0
CQSigImgMonitor 0 123 16
analogMonitor 0 0
aoaFovCfg -1 -90 90 -90 90
cfarFovCfg -1 0 0 30.99
cfarFovCfg -1 1 -2.51 2.51
sensorStart
Would appreciate any help/inputs.
Best regards,
Vadim.





