Hi
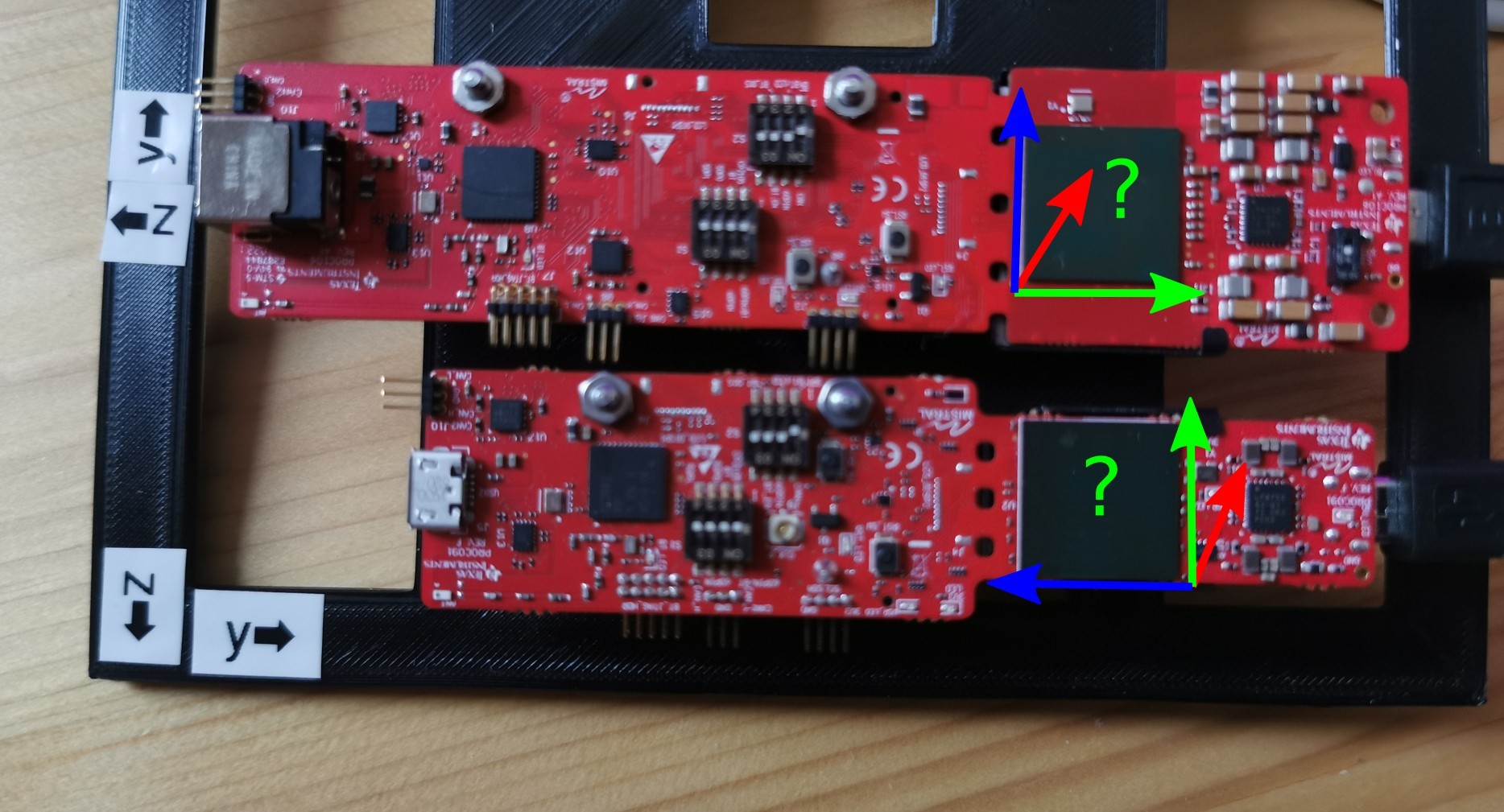
I have an 1843AOPEVM and and 6843AOPEVM and am using the ros driver. To me, it seems like the two devices have their coordinate system placed differently. Can anyone from engineering confirm this?
Here is a sketch of the setup with the axes labelled (which are probably wrong).
Thx for your insights
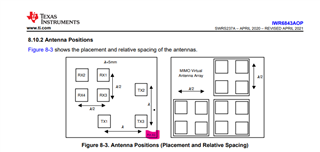
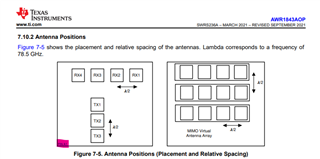
edit: I found these images on the user guides:

Where are the axes labelled for the 1843AOP?
Also, where is the y-axis for the 6843AOP? Left or right-handed frame?