Hello,
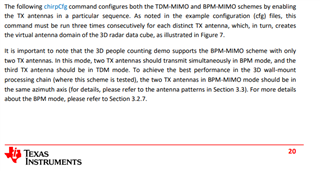
I am using a IWR6843AOPEVM in a wall-mounted setup running the 3D-people counting demo. For my user-case enabling the Fine Motion Detection Mode and BPM-MIMO (Binary Phase Modulation) as described in the detection layer tuning guide seems like a fine idea, yet i can't seem to get it to work.
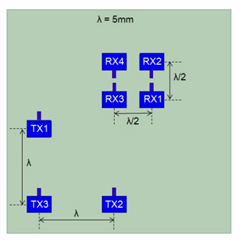
These are the chirp configurations i am using, which corresponds to the physical positioning of the AOP (e.g Tx0 and Tx2 are on the same Azimuth) :
profileCfg 0 60.75 30.00 25.00 59.10 394758 0 54.71 1 48 2950.00 2 1 36
chirpCfg 0 0 0 0 0 0 0 5
chirpCfg 1 1 0 0 0 0 0 2
chirpCfg 2 2 0 0 0 0 0 5
frameCfg 0 2 48 0 40.00 1 0
fineMotionCfg -1 1
bpmCfg -1 1 0 2
Thank you for your time,
Bram