Hello,
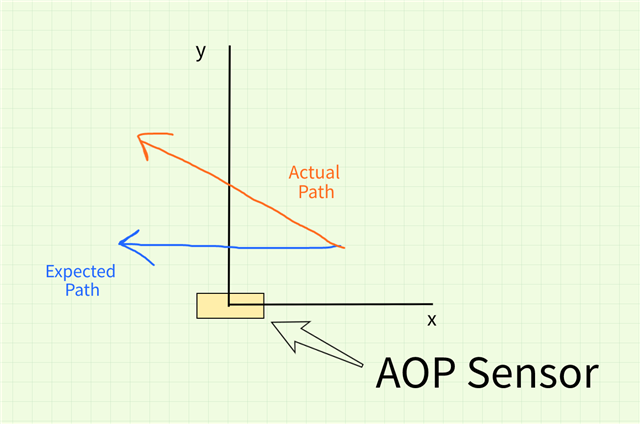
My team recently ran an experiment with the OOB demo. We set up the sensor on a desk with the front face (see image 1) facing outward toward the room. We then had a person walk from one side of the room to the other in front of the sensor. We captured the point-cloud data using a Python script, and then plotted the x and y data. The sensors were able to pick up the person's movement, put not in the direction expected. Instead of traveling in front of the sensor at a constant y value, the data shows the person traveling at an inclined path on the xy-plane (see image 2).
I'm a bit confused on where this difference is coming from. Is there a diagram somewhere showing where the origin and x, y, and z axes are relative to the physical device?