


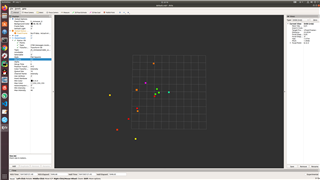
I have an AWR 1843 mmwave radar sensor and try to obtain 3d point clouds by runing the ROS package of "ti_mmwave_rospkg" in ubuntu 18.04. Although AWR 1843 can successfully work with ROS together, the quality of point cloud data is poor. As shown in the following figure, we can't distinguish objects from point clouds data at all which looks like a few chaotic points.
However, the TI official demo can achieve better results than me, as shown in the following figure:

We can even identify the legs of the experimenter during movement. It can be seen in this link:
I have use the default parameters in the .cfg file. Why does this different phenomenon occur?
Can someone explain it for me, and what should i do to obtain more points of object to achieve the effect in TI official demo.

