Hello TI Support Team,
Good Day!
Can you please help me reduce the noise(encountered on empty roads) and increase the obstacle detection range(as of now, I have configured the range to 50 meters using the Demo Visualizer), but the obstacle detection is not even to close to 50 meters at all times.
Please find the attached image of radar mounted on the Car.
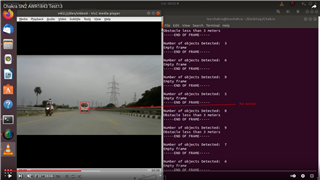
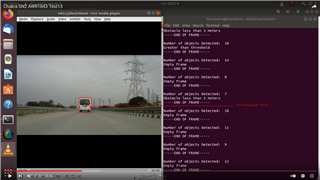
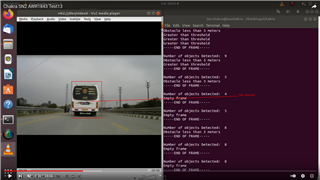
Please note, We have restricted the beam to Car's width(1.56 Meters) using our own logic(this is to remove noise) , we restricted the elevation from 0 to 3 meters and also all Obstacles greater than 3 meters only be printed(this also to avoid noise)
Now the maximum detection range have increased compared to previous tests.
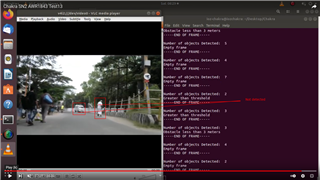
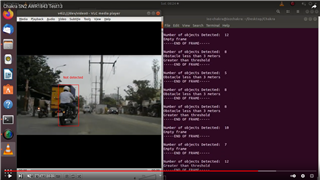
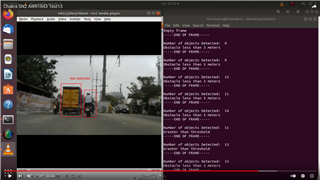
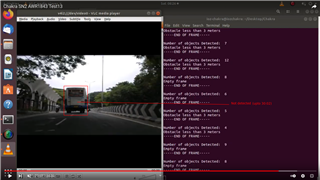
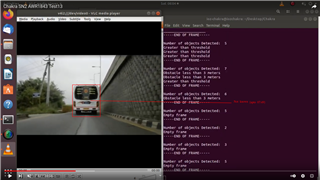
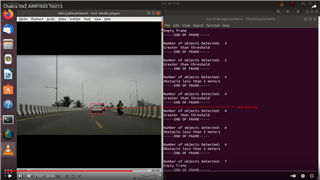
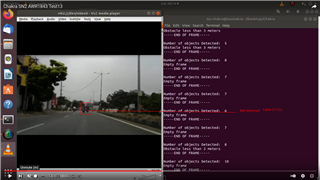
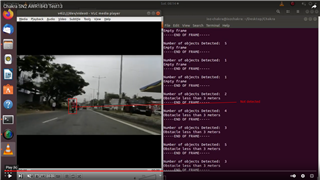
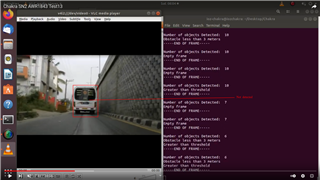
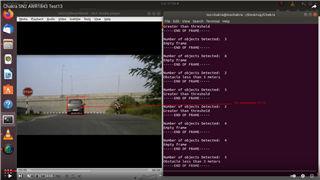
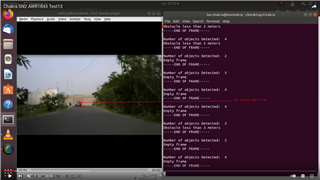
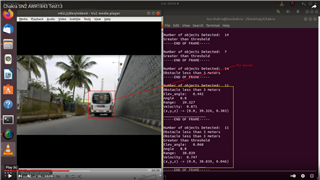
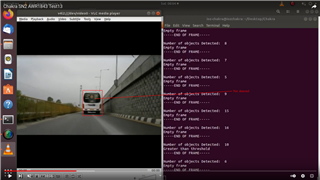
I have attaching images of obstacle not detected and noise(on empty roads & with vehicles present in the front), Can you please help us reduce the noise and let us know the process to increase the detection range, as the obstacles are sometimes detected within the 10 to 20 meters range(but if the host vehicle speed is greater than 80 KMPH, it would be difficult to brake)
Please note, some of the false positives(noise on empty roads) encountered in the angle +-1.79*, Can you please let me know the process to avoid the same
Please find the attached Config FIle:
xwr18xx_profile_2022_01_07T06_21_48_255.cfg

Can you please help me resolve this issues
Thanks
Guru