


Other Parts Discussed in Thread: AWR2944
Hi
We are trying to verify the maximum velocity of DDMA method of AWR2944 device which maximum velocity can reach 140kph.
In our experiment result, we find that the velocity can reach -140kph in negative region while in positive region, it only reach 50kph.
When the velocity exceeds 50kph, the velocity value will be wrong.
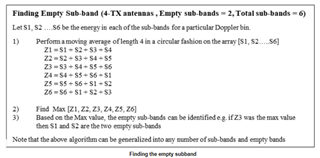
From the document ti/mmwave_mcuplus_sdk_04_02_00_02/mmwave_mcuplus_sdk_04_02_00_02/ti/datapath/dpc/dpu/dopplerprocDDMA/docs/doxygen/html/index.html.
We find that the doppler is selected from Z-value. If the velocity is negative, the maximum Z-value will be Z1, Z2 or Z3.
However, if the velocity is positive, the maximum Z-value will be Z4, Z5 or Z6 which will wrap the S1 to S3 value back from the spectrum.
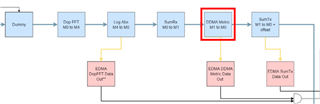
But the c code in C:\ti\mmwave_automotive_toolbox_3_6_0\labs\lab0015_high_end_corner_radar\src\datapath\dpc\dpu\dopplerprocDDMA\src\dopplerprochwaDDMA.c (line 1052-1151),
when calculate Z4, Z5, Z6, the value S1, S2, S3 are from the next chirp rather than wrapping back the same chirp S1,S2, S3 values. (Flow chart in red line block, DDMA Matric step)
I think without the wrapping back, it may cause the wrong positive velocity.
How to modify the c code to solve this problem?
Thank you.
Best Regards,
Wei Sung




