Other Parts Discussed in Thread: AWR2243
Hello,
I was using default MIMO LUA files (Cascade_Configuration_MIMO.lua and Cascade_Capture.lua) to capture some raw data. Antenna calibration was done before I captured the raw data.
From the post-processed plots with cascade_MIMO_signalProcessing.m, I was confused about the frame/coordinate definition of the RF board.
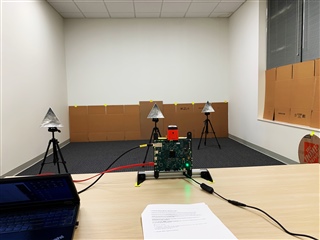
(1) Here is my setup.
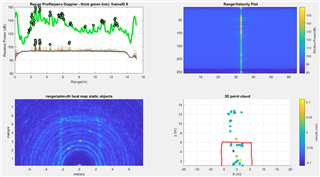
(2) Here are the plots after post-processing with cascade_MIMO_signalProcessing.m
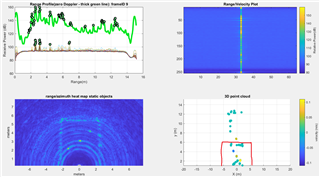
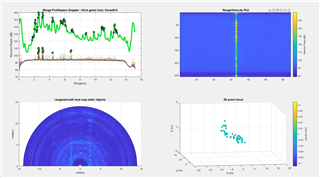
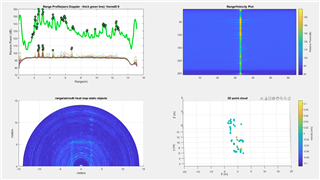
From the "range/azimuth heat map static objects" plots, they make sense to me. The heatmaps can basically detect all strong reflectors and roughly detect the shape of the room.
However, the "3D point cloud" plots didn't make sense to me. For example, on the x-y plane, the detected strong reflectors had wrong orientations.
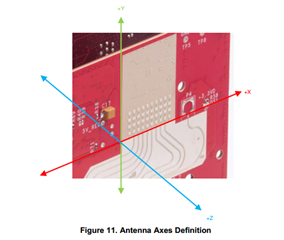
Also, from the frame definition of "AWRx Cascaded Radar RF Evaluation Module.pdf", the plots used different coordinate definition.
So I have two questions/confusions here.
(1) What is the frame definition that cascade_MIMO_signalProcessing.m used. Roughly I can see, Z is up, Y is forward and X is to the right. If so, where is the origin of this frame definition on the RF board?
(2) From the plots, why the "3D point cloud" plot are inconsistent with the "range/azimuth heat map static objects" plots?
Thank you very much for the help!
Best,
Hang