Other Parts Discussed in Thread: TIDA-00317
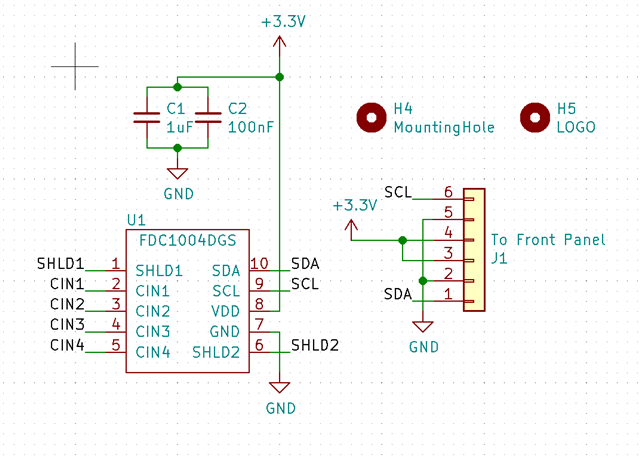
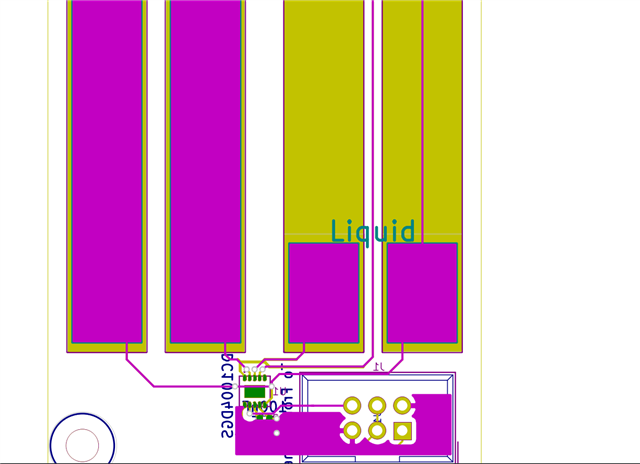
Hello, I am developing a remote liquid level sensor using the FDC1004. I followed the reference design closely, with CIN1 measuring the level electrode, CIN2 liquid electrode, and CIN3 environment electrode.
All measurements are quite linear with water height, but for some reason the environment channel (CIN3) is offset. For example, with no water in the tank the capacitances are as follows:
Level: 8.75pF
Liquid: .88pF
Environment: 9.43pF
I was hoping you had some insight into what is causing the offset, it makes it impossible to compensate for temp/humidity.
Thank you,
Aidan