


Hi,
I used subframe configuration for long range detection in OOB demo. (SDK 3.5, Refer to configuration in Long Range People Detection Lab)
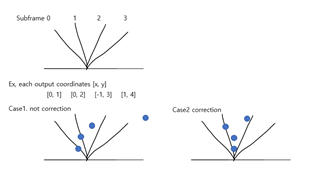
These subframes are aiming to focus on the angle of [-33.75, -11.25, 11.25, 33.75].
sensorStop flushCfg dfeDataOutputMode 3 channelCfg 15 7 0 adcCfg 2 1 adcbufCfg -1 0 1 1 1 profileCfg 0 61.0 10 6 135 0 14970880 1.8 1 256 2000 0 0 48 profileCfg 1 61.0 10 6 135 0 10276864 1.8 1 256 2000 0 0 48 profileCfg 2 61.0 10 6 135 0 6565888 1.8 1 256 2000 0 0 48 profileCfg 3 61.0 10 6 135 0 1871872 1.8 1 256 2000 0 0 48 chirpCfg 0 0 0 0 0 0 0 7 chirpCfg 1 1 1 0 0 0 0 7 chirpCfg 2 2 2 0 0 0 0 7 chirpCfg 3 3 3 0 0 0 0 7 advFrameCfg 4 0 0 1 0 subFrameCfg 0 0 0 1 128 80 0 1 1 80 subFrameCfg 1 0 1 1 128 80 0 1 1 80 subFrameCfg 2 0 2 1 128 80 0 1 1 80 subFrameCfg 3 0 3 1 128 160 0 1 1 160 lowPower 0 0 guiMonitor -1 2 0 0 0 0 0 cfarCfg -1 0 2 8 4 3 0 12 0 cfarCfg -1 1 0 4 2 3 1 12 1 multiObjBeamForming -1 1 0.5 clutterRemoval -1 0 calibDcRangeSig -1 0 -5 8 256 extendedMaxVelocity -1 0 bpmCfg -1 0 0 1 lvdsStreamCfg -1 0 0 0 compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 measureRangeBiasAndRxChanPhase 0 1.5 0.2 CQRxSatMonitor 0 3 4 63 0 CQSigImgMonitor 0 127 4 analogMonitor 0 0 aoaFovCfg -1 -70 70 -90 90 cfarFovCfg -1 0 0.6 200 cfarFovCfg -1 1 -30 30.00 calibData 0 0 0 sensorStart
Q1. Is the output point cloud of each frame/subframe output coordinates with angular focus corrected? Or are the coordinates uncorrected for angles?
Q2. When using a single frame, the radar cube memory is (NumRx * NumTx * RangeFFT * DopplerFFT * SampleSize).
If 4 subframes are used, can radar cube memory multiply the above value by 4? (NumSubframe * NumRx * NumTx * RangeFFT * DopplerFFT * SampleSize).
Thanks.
