


Hi,
I tested detection performance with OOB demo FW(SDK 3.5) using IWR6843ISK.
The test environment is as follows.
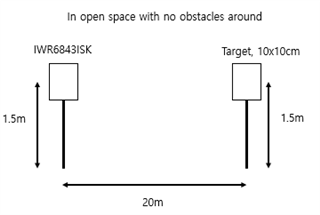
and configuration is below.
sensorStop flushCfg dfeDataOutputMode 1 channelCfg 15 7 0 adcCfg 2 1 adcbufCfg -1 0 1 1 1 profileCfg 0 60 10 7 49.1 0 0 50 1 512 12499 0 0 158 chirpCfg 0 0 0 0 0 0 0 1 chirpCfg 1 1 0 0 0 0 0 4 chirpCfg 2 2 0 0 0 0 0 2 frameCfg 0 2 16 0 100 1 0 lowPower 0 0 guiMonitor -1 1 1 1 0 0 1 cfarCfg -1 0 2 8 4 3 0 15 0 cfarCfg -1 1 0 4 2 3 1 15 1 multiObjBeamForming -1 1 0.5 clutterRemoval -1 0 calibDcRangeSig -1 0 -5 8 256 extendedMaxVelocity -1 0 bpmCfg -1 0 0 1 lvdsStreamCfg -1 0 0 0 compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 measureRangeBiasAndRxChanPhase 0 1.5 0.2 CQRxSatMonitor 0 3 5 101 0 CQSigImgMonitor 0 127 8 analogMonitor 0 0 aoaFovCfg -1 -90 90 -90 90 cfarFovCfg -1 0 0.6 30 cfarFovCfg -1 1 -1 1.00 calibData 0 0 0 sensorStart
The coordinates of the detected cloud point are [0.6, 20.85, 4.76]
I haven't tried RX channel gain/phase compensation yet, but I think the error is too big in z-axis.
An error of 4.7m is calculated as an error of about 13 degrees.
I will buy soon corner reflector for RX channel gain/phase compensation, but are there any considerations other than phase error?
Thanks.
