



Hello,
, there's description of target index tlv like this:
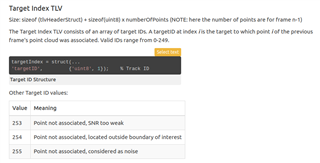
Qestion 1:
If I get it clear, it means we can only know which cluster does one point belong to in the next frame, am I right?
Qestion 2:
Does the cluster or target come from algorithm based on the point cloud tlv of the current frame (the same as the target tlv) or the former frame?
Thank you.
Best regards
Woody


