


Other Parts Discussed in Thread: TDA2
Hi, in the processor sdk radar datasheet page 17 the data flow is shown:
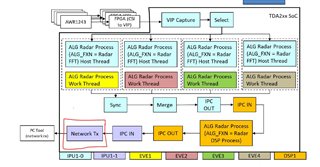
but in the doc the format/structure of the output data sent to matlab is not shown (in the awr series radar each lab had documentation about the tlv format), where could I find this info for the TDA2?, thanks
