

Other Parts Discussed in Thread: TMAG5273
The first step when designing for any angle measurement using magnetic inputs (Hall-effect, AMR, GMR, TMR) is to select the magnet to be used as an input source. Depending on the directional sensitivity of the sensor, it will be important to ensure that adequate field inputs are present for the sensor to operate normally. Consider briefly TMAG5170 or TMAG5273. These devices are linear three dimensional (3D) Hall-effect sensors. TMAG5170 uses an SPI interface, while TMAG5273 communicates using I2C. With sensitivity in all three axes the sensor placement is flexible for either sensor.
Placement Considerations

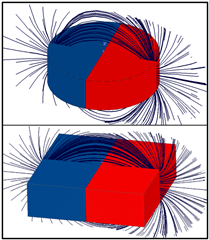
There are a few key considerations to note from the positions shown in the preceding figure. The On-Axis case is the most ideal location for angle sensing using a single magnetic sensor. In this placement, the field is naturally parallel to the surface of the magnet and will reside entirely within the XY plane of the sensor. To achieve this placement, the diametric magnet is centered on the rotating shaft and the sensor is aligned exactly to the magnet's axis of rotation. This relationship will hold true in this position even when using a magnet with a non-circular profile. A 2D slice of the field containing the axis of polarization for both cylinder and bar magnets is shown below. We see that regardless of the shape, the field is parallel to the magnet face above center. This means that relative to the magnet, the B-field vector is naturally one-dimensional, and therefore will produce ideal sine/cosine inputs to a stationary 3D sensor placed On-Axis.
While the square faced magnet may be used for on-axis measurements, it would otherwise not be recommended due to the non-sinusoidal nature of the input magnetic field. The square magnet is simplifies alignment during assembly of the end product. For any magnet profile, the primary benefit of on-axis alignment is that mechanical errors tend to have a lesser impact on the final angle measurement.
Another option shown in the first image is an In-Plane alignment. This is a very compact alignment option but produces inputs which are significantly mismatched. The resulting amplitude mismatch creates non-linearity of the angle calculation. TMAG5170 and TMAG5273 offer amplitude correction to minimize this effect. This alignment allows a dipole ring magnet to be installed anywhere along the rotating shaft, and this keeps the end of shaft free for use by the rest of the system. In-plane alignment enables angle measurement to be more easily integrated onto a BLDC motor with minimal increases in size.
The final placement option is labeled as off-axis and represents all other locations. Outside of the in-plane and off-axis alignments, there are any number of locations that will produce a measurable field with a component in all three Cartesian directions. The amplitude of each component will vary with location, but these remain sinusoidal and separated in phase from each other by 90 degree intervals. Additionally, there are positions which may be found that will produce equally balanced inputs, but it should be expected that there will likewise be amplitude mismatch between the two axes used for angle calculation.
Magnet Properties
Aside from selecting whether or not to use a diametric cylinder for an on-axis measurement or a ring magnet for either off-axis or in-plane measurements, various other magnet properties will influence the magnetic field being observed.
- Material Grade
The material grade for any magnet directly influences the B-H relationship of that magnet. It is useful to understand the relationship of the resulting B-field for any magnet as a result of an applied external H-field source.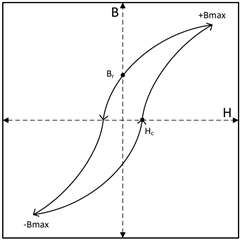
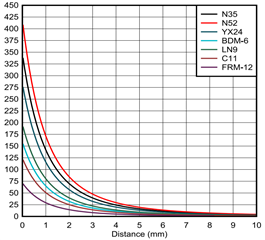
When the applied H-field used to magnetize a permanent magnet is removed, the residual B-field value is referred to as remanence, or Br . This value is measured in a closed magnetic circuit, and is not equivalent to the surface field of the magnet. Surface field is measured in an open magnetic circuit using a magnetometer, and will vary with the magnet geometry. Br will be constant for any size magnet of the same grade, while the surface field produced by a magnet will depend on the relationship between the surface area and pole length of that magnet. The various difference grades of any magnetic material will have a different Br values, which determine the resulting magnetic field strength for that magnet. Consider the relationship between B-field and distance of various grades and materials of magnets with equal dimensions shown in The plot below. With the sensor placed along the axis of polarization of the magnet, it is possible to adjust range to find the peak B-field value which will be observed during rotation. For this case and all following plots, a magnet which has a diameter of 6 mm and a thickness of 3 mm will be used.
- Size
As mentioned in before, the size of the magnet will influence the surface magnetic flux density, and resulting measured field for any given magnet. Consider the relationship of B-field vs. Distance for various N52 grade neodymium magnets whose height and radius are equal.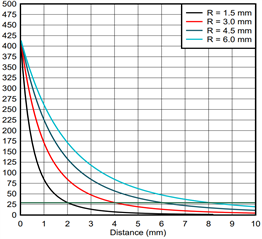
Notice that in this case the surface field is equivalent for each magnet, and the observed field at any air gap distance is greater for a larger magnet radius. What is also interesting to note, is that the ratio of the field observed at any distance to the radius of the magnet remains constant. That is, the field observed at 2 mm using the 1.5 mm radius magnet is equivalent to the field at 8 mm using the 6 mm magnet radius. - Temperature Drift
The various magnetic materials available all have differing responses to variations in temperature. For all magnets, the magnetic field strength will reduce by some value up until the Curie temperature, where the atomic dipoles within the magnet can no longer retain magnetic alignment. The typical value for various magnet materials is shown below: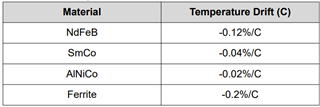
For systems with a wide operating temperature range, Samarium Cobolt (SmCo) type magnets are often selected for their low temperature drift, although they do not offer as strong of a field typically observed with Neodymium magnets. Ultimately for most applications, the goal will be to use the smallest magnet available that can produce a measurable input for the sensor. For any system, the ability to mount the magnet to a rotating shaft, cost and availability might be the dominant factors in magnet selection. Neodymium magnets (NdFeB) tend to offer the highest magnetic field strength while ferrite magnets tend to be the lowest cost.
For more information regarding angle measurements using Hall-effect sensors, please refer to the following content:
| Title | Description |
| Achieving Highest System Angle Sensing Accuracy | A summary of factors that impact angle measurement along with calibration methods to minimize total error |
| Absolute Angle Measurements for Rotational Motion Using Hall-Effect Sensors | A brief discussion introducing angle measurements with Hall-effect sensors |
| Angle Measurement With Multi-Axis Linear Hall-Effect Sensors | A guided discussion regarding how angle measurements are performed along with demonstrated lab data |
| System Calculation for precise angle measurements | A video discussion of angle sensing methods and the impact of mechanical tolerances |