Hi,
I tested Long Range People Detection demo in Industrial Toolbox 4.6.0 with IWR6843ISK.
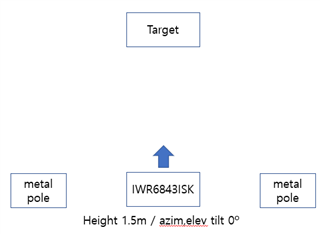
In an open field(without obstacles), IWR6843ISK was installed at a height of 1.5m to face the front, and the detection performance was checked by moving it in various directions.
(In the physical setup of the user guide, it says to tilt it down 2~3 degrees, but to check the maximum distance sensing performance, it was installed in the front.)
So, I changed sensorPosition Config params to "sensorPosition 1.5 0 0".
Below is chirp config I run. (It is modify only "sensorPosition" from "people_detection_and_tracking_50m_2D.cfg" file)
sensorStop flushCfg dfeDataOutputMode 1 channelCfg 15 7 0 adcCfg 2 1 adcbufCfg -1 0 1 1 1 profileCfg 0 60 35 6 43.0 0 0 8.241 1 125 3433 0 0 48 chirpCfg 0 0 0 0 0 0 0 1 chirpCfg 1 1 0 0 0 0 0 4 frameCfg 0 1 128 0 100 1 0 lowPower 0 0 guiMonitor -1 1 0 0 0 0 0 cfarCfg -1 0 2 8 4 3 0 10 0 cfarCfg -1 1 0 4 2 3 1 10 0 multiObjBeamForming -1 1 0.5 clutterRemoval -1 1 calibDcRangeSig -1 0 -5 8 256 extendedMaxVelocity -1 0 bpmCfg -1 0 0 1 lvdsStreamCfg -1 0 0 0 compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 measureRangeBiasAndRxChanPhase 0 1.5 0.2 CQRxSatMonitor 0 3 4 63 0 CQSigImgMonitor 0 127 4 analogMonitor 0 0 aoaFovCfg -1 -90 90 -90 90 cfarFovCfg -1 0 0 59.99 cfarFovCfg -1 1 -30 30.00 %SceneryParam -50 50 0.5 60 -6 6 staticBoundaryBox -9.5 9.5 0.6 50 0 2 boundaryBox -50 50 0.5 60 -6 6 gatingParam 4 6 6 6 10 stateParam 4 10 60 100 20 600 allocationParam 30 30 0.5 3 2 2 maxAcceleration 0.1 0.1 0.1 trackingCfg 1 2 250 20 78 121 99 sensorPosition 1.5 0 0 presenceBoundaryBox -3 3 2 6 0.5 2.5 sensorStart
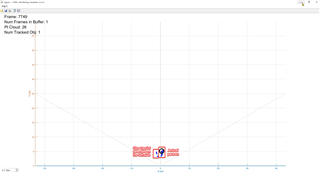
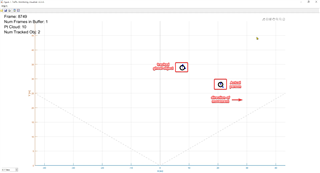
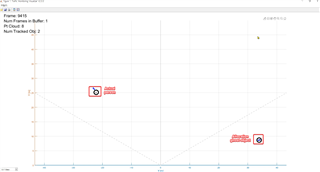
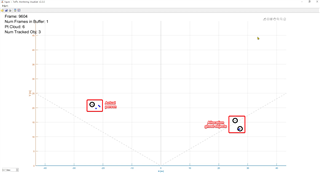
As a result of the test, several types of ghost objects were observed.
Case1. Observed from the left side of the real object.


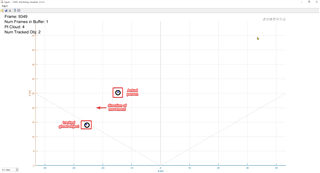
Case2. Observe from the opposite angle at the maximum detectable azimuth
Can I get some advice on what causes ghost objects and how to remove them?
Thanks.