Hello everyone,
I have designed a prototype board to work in tandem with the LDC1614, and wanted to ask TI engineers for some advice. TI is always super helpful 
Here is the goals for the board:
- 0.1 degree resolution (0.5 degree is still acceptable)
- Will be placed in a fully aluminum part, which will have moving aluminum inside as well. The moving aluminum will be around 0.7mm to 1.5cm away from the sensor.
- The board will be a very small package sensing, and will need to detect a target moving in an arc (120 degrees)
- We aim to sense a change in the inductance as target passes over it. We don't care too much about the absolute inductance and LC tank frequency, only the relative change from a calibration point.
Here is the design:
Specs:
- Layers: Either 4 or 6
- Trace Width: 4mils
- Trace Spacing: 4mils
- Board edge to nearest trace spacing: 4mils
- Via outer diameter: 16mils. There is plenty of space in the middle of the board, so we could do 20mils
- Via inner diameter: 10mils. Again, can go bigger.
- PCB thickness: 0.8mm
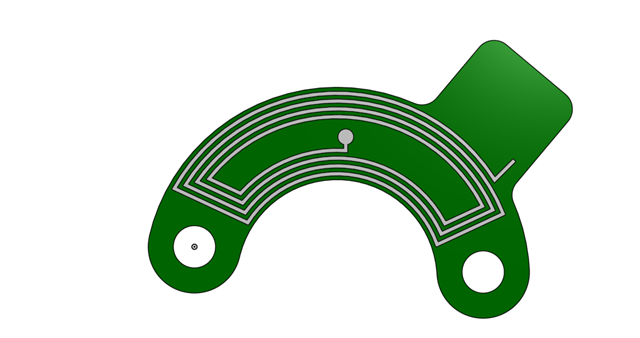
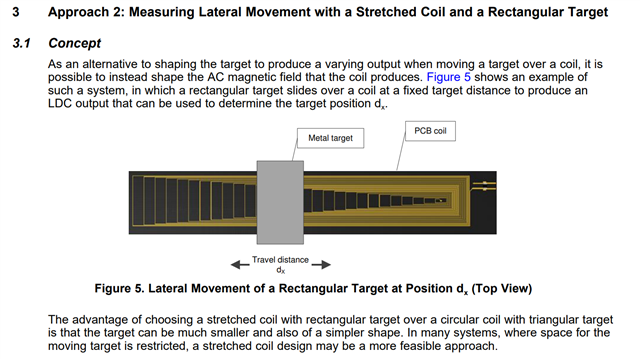
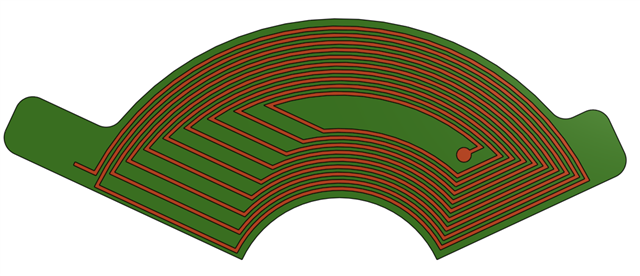
The inductive coil will be put on 6 layers (varying between clockwise rotation, as seen below, and anticlockwise, layer by layer)
Images:
You may have to click on the images to get the resolution needed to see the space between the sensors. The little rectangle on the top left is space for a connector. A 0201 Inductor and Capacitor will be placed on a flex cable that connects to this board. The board is 150 degrees, but we only need to sense 120 degrees of motion.
The target will be a PCB in the exact form factor as above, except it will just be solid copper.
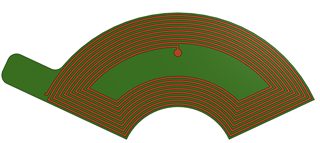
Note that the space in the middle is 31% of the total area, a tip which I got from this paper.
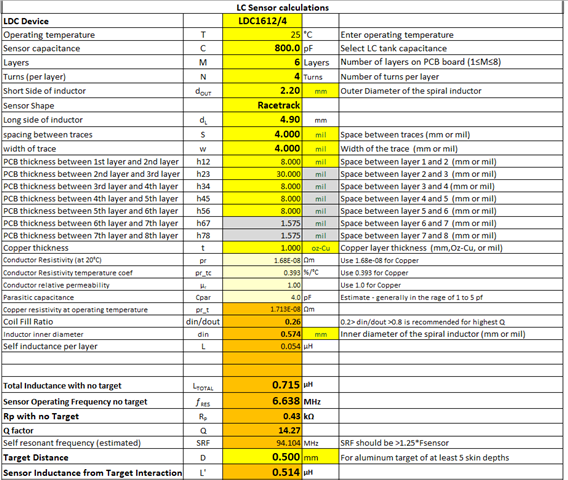
Simulated performance with the LDC1614
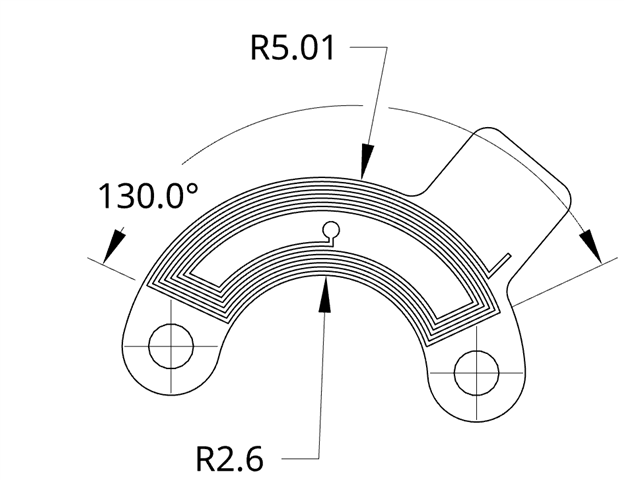
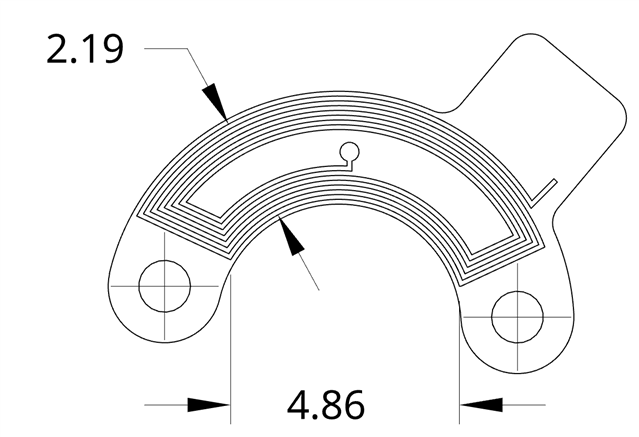
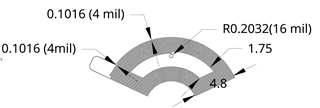
I estimated the coil to be a square. We can imagine if we unbend the traces upwards, the coil will become a rectangle. Approximately, the height of the rectangle will be 4.8mm, and the length will be around 9mm (roughly).
Using TI's WEBENCH Coil Designer, I set the parameter as square coil, 8 turns per layer, 4 layer thickness, 4.8mm outer diameter, 4mil trace width and 4mil trace spacing. Here are the results: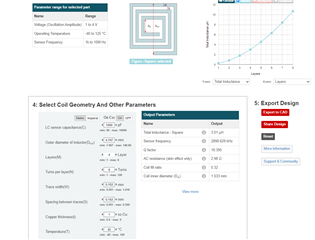
Roughly, the coil is 3.01uH, and with a parallel capacitor of 1000pF the sensor frequency is approximately 3MHz.
Here are some questions I have
- This is the first time I am building something like this. Do you see anything glaringly wrong? Is the 0.5 degree accuracy and resolution min requirement too much?
- The TI paper I referenced above mentions to " Keep the inner 30% of the sensor area unwound for most applications, but for inductive metal button replacement, place as many turns as possible.". It does not mention why?
- Given that this will operate around moving metal, do we foresee any problems?
- The edge clearance to the nearest trace is 4mils, should we be pushing that farther?