


Hi,
I tested OOB Demo in SDK 3.5
I detected the vehicle in front and observed the result using IWR6843ISK.
It was detected when the vehicle was moving, not when it was stopped.
The vehicle was detected from 40 m and was not detected after stopping.
The distance from the stopped vehicle is about 28 m, and when the vehicle is moving, it is detected again.
The configuration used are as follows.
% *************************************************************** % Created for SDK ver:03.05 % Created using Visualizer ver:3.5.0.0 % Frequency:60 % Platform:xWR68xx % Scene Classifier:best_range % Azimuth Resolution(deg):15 % Range Resolution(m):0.195 % Maximum unambiguous Range(m):50 % Maximum Radial Velocity(m/s):15 % Radial velocity resolution(m/s):0.94 % Frame Duration(msec):100 % RF calibration data:None % Range Detection Threshold (dB):15 % Doppler Detection Threshold (dB):15 % Range Peak Grouping:enabled % Doppler Peak Grouping:enabled % Static clutter removal:disabled % Angle of Arrival FoV: Full FoV % Range FoV: Full FoV % Doppler FoV: Full FoV % *************************************************************** sensorStop flushCfg dfeDataOutputMode 1 channelCfg 15 5 0 adcCfg 2 1 adcbufCfg -1 0 1 1 1 profileCfg 0 60 8 7 33.64 0 0 30 1 320 12499 0 0 158 chirpCfg 0 0 0 0 0 0 0 1 chirpCfg 1 1 0 0 0 0 0 4 frameCfg 0 1 32 0 100 1 0 lowPower 0 0 guiMonitor -1 1 1 1 0 0 1 cfarCfg -1 0 2 8 4 3 0 15 1 cfarCfg -1 1 0 8 4 4 1 15 1 multiObjBeamForming -1 1 0.5 clutterRemoval -1 0 calibDcRangeSig -1 0 -5 8 256 extendedMaxVelocity -1 0 bpmCfg -1 0 0 1 lvdsStreamCfg -1 0 0 0 compRangeBiasAndRxChanPhase 0.0762179 -0.60397 -0.64542 -0.66522 -0.66946 -0.64209 -0.70471 -0.37708 -0.86667 -0.76633 -0.37451 -0.84061 -0.35657 -0.78491 -0.30798 -0.61557 -0.57355 -0.83316 0.55045 -0.82367 0.56708 -0.82932 0.52661 -0.97696 0.17557 measureRangeBiasAndRxChanPhase 0 1.5 0.2 CQRxSatMonitor 0 3 4 79 0 CQSigImgMonitor 0 105 6 analogMonitor 0 0 aoaFovCfg -1 -90 90 -90 90 cfarFovCfg -1 0 0 49.99 cfarFovCfg -1 1 -15 15.00 calibData 0 0 0 sensorStart
The detection result using visualizer is as follows.
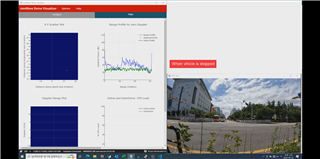
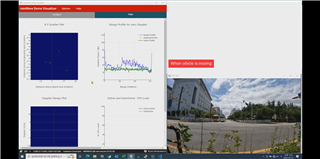
A moving vehicle could be detected at a greater distance (40m), but it does not make sense that it is not detected when it is stopped.
Any advice on why the static object is not being detected would be appreciated.
Thanks.
