

Hello Experts,
My customer is using Overhead Mount Vehicle Occupancy Detection demo from Automotive Toolbox. When they check UART Output Data (fHistRT.mat), Range is always 0 as follows. Is it expected behavior?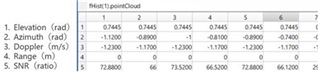
Best regards,
Ken

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
