


Other Parts Discussed in Thread: IWR1443
Hello everybody,
I'm working these days on a project in which i use the IWR1443BOOST, i'm using also the ROS driver developed by the TI team to get the point cloud representation of moving objects in the installation environment, i flashed the oob image for the iwr1443. and i created my own config file bellow :
sensorStop flushCfg dfeDataOutputMode 1 channelCfg 15 7 0 adcCfg 2 1 adcbufCfg 0 1 0 1 profileCfg 0 77 118 7 40 0 0 100 1 240 7500 0 0 42 chirpCfg 0 0 0 0 0 0 0 1 chirpCfg 1 1 0 0 0 0 0 4 chirpCfg 2 2 0 0 0 0 0 2 frameCfg 0 2 16 0 33.333 1 0 lowPower 0 0 guiMonitor 1 0 0 0 0 0 cfarCfg 0 2 8 4 3 0 1280 peakGrouping 1 0 0 1 229 multiObjBeamForming 1 0.5 clutterRemoval 0 calibDcRangeSig 0 -5 8 256 compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 measureRangeBiasAndRxChanPhase 0 1.5 0.2 CQRxSatMonitor 0 3 4 99 0 CQSigImgMonitor 0 119 4 analogMonitor 1 1 sensorStart
When i start the ros driver using the appropriate command everything works good like in this RViz representation :
As you can see on the figure the green ellipsoid is a real human moving but the red squares are not real "targets" : the smallest one is just near the radar position or very close to it
the farthest red square from the radar (biggest one) is very near to a glass wall in the detection area
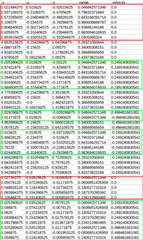
The resulting data was like :(saved in bag and converted to table)
As you can seed the glass wall is the object having the farthest distance on x.
Knowing that i tried to set clutterRemoval to 1 but it removes every point (even the moving targets).
My question is : Is there a way to remove the glass wall representation and the static points just in front of the radar (don't know from where it comes --> there no obstacle near of the radar)

Thank you in advance for your help it will really help me to go forward, and i'll really appreciate.
Abdellah.
