Hello guys.
I am developing with IWR6843AOP board which I designed.
I have a question while checking the chirp configuration.
In my situation about checking,
I used a area_scanner_68xx_AOP.cfg(C:\ti\mmwave_industrial_toolbox_4_11_0\labs\Area_Scanner\chirp_configs)
so you can see the configuration
% ***************************************************************
% Created for Area Scanner v2.0.x
% Frequency:60
% Platform:xWR68xx
% Azimuth Resolution(deg):15 + Elevation
% Range Resolution(m):0.0703
% Maximum unambiguous Range(m):14.4
% Maximum Radial Velocity(m/s):2.45
% Radial velocity resolution(m/s):0.15
% Frame Duration(msec):100
% ***************************************************************
% *****************STANDARD MMWAVE SDK COMMANDS******************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 7 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
profileCfg 0 60.5 100 25 69 0 0 50 1 256 6000 0 0 30
......
1-1)
The parameters were selected in the values written above
% Range Resolution(m):0.0703
% Maximum unambiguous Range(m):14.4
% Maximum Radial Velocity(m/s):2.45
% Radial velocity resolution(m/s):0.15
After that, I put the values on the mmWave Sensing Estimator
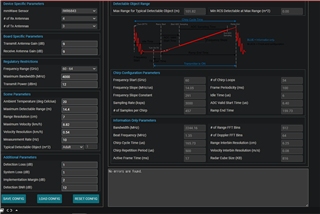
So, The max distance value was different from the set value when I calculated it.
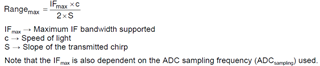
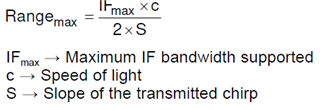
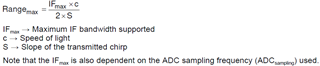
In this equation
Range_max=(3000k*3*10^8)/(2*14.05MHz/us)=32.03m
I set the maximum detection distance to 14.4m, why am I getting this result?
What am I missing?
1-2) When the experiment was conducted, the measured value was 10m.
In my opinion, the difference between the target value(14.4m(Maximum unambiguous Range) and the experimental result is too large.
1-3)
The parameters were selected in the values written above
% Range Resolution(m):0.0703
% Maximum unambiguous Range(m):14.4
% Maximum Radial Velocity(m/s):2.45
% Radial velocity resolution(m/s):0.15
What is different unambiguous range and max distance?
Does it mean that the values measured beyond the unambiguous range are inaccurate? Or do you mean it's not detectable?
ex) I mean that max distance is 32.03m but unambiguous range is 14.4m
Does it mean when i stand at 18m. Does the sensor not detect it? or Detect, but low distance accuracy?
(Is it measured like 10m, 20m or etc. outside the error range instead of 18m? )
And How can i calculate unambiguous range?
1-4) when I calculate STANDARD MMWAVE SDK COMMANDS and the target value, the target value and STANDARD MMWAVE SDK COMMANDS are different
% *****************STANDARD MMWAVE SDK COMMANDS******************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 7 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
profileCfg 0 60.5 100 25 69 0 0 50 1 256 6000 0 0 30
Fs=6000ksps
S=50MHz/us
so Range_max=(6000k*3*10^8)/(2*50MHz/us)=18m
I have two questions here
1-4-1) Because of the question '1-3) What is different unambiguous range and max distance?'
Is there a difference for this reason?
1-4-2) Why is the value of 'mmWave Sensing Estimator' different from 'STANDARD MMWAVE SDK COMMANDS'
--------mmWave Sensing Estimator----
Fs=3000ksps
S=14.05MHz/us
--------STANDARD MMWAVE SDK COMMANDS----
Fs=6000ksps
S=50MHz/us
Which one is right?
Thanks
Sincerely