Hello,
I am using IWR1843BOOST and TI's ROS package to generate a 3D point cloud on my laptop.
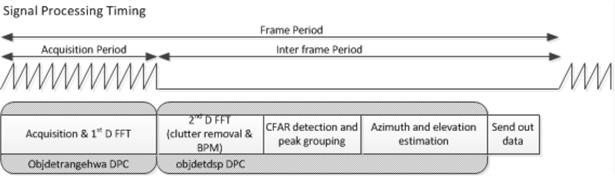
I would like to know what kind of signal processing is done by the on-chip processor for generating this point cloud. For example is it a 3D FFT based approach? Or some other method?
An elaborate answer would be appreciated!
Thanks,
Srayan Sankar Chatterjee