Hi, TI team,
It seems to be different heatmap data arrangement between function codes and the description in document while computing the static scene Azimuth-Elevation Bartlett beamforming.
(The source codes are imported from project: "C:\ti\mmwave_industrial_toolbox_4_11_0\labs\People_Counting\3D_People_Counting\src\68xx\68xx_3D_people_count_dss.projectspec".)
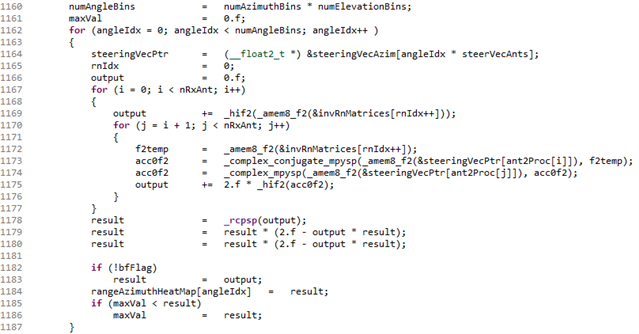
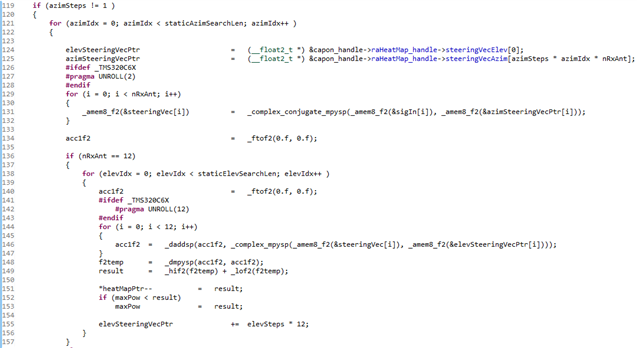
(The source codes are in lines 119~177 in RADARDEMO_aoaEstimationBFSinglePeak_static() function in RADARDEMO_aoaEstimationBFSinglePeak_staticHeatMapEst.c file. And "RADARDEMO_aoaEstimationBFSinglePeak_static()" is called by RADARDEMO_aoaEst2DCaponBF_static_run() while "processingStepSelector == 0". )
。In codes: Using 2 for loops which process all elevation index (in inner loop) according to each azimuth index (outer loop), then change to next azimuth index to keep processing:
=> The arrangement become: [azimIdx_0; elevIdx_0 ~ elevIdx_End], [azimIdx_1; elevIdx_0 ~ elevIdx_End], ... [azimIdx_End, elevIdx_0 ~ elevIdx_End]
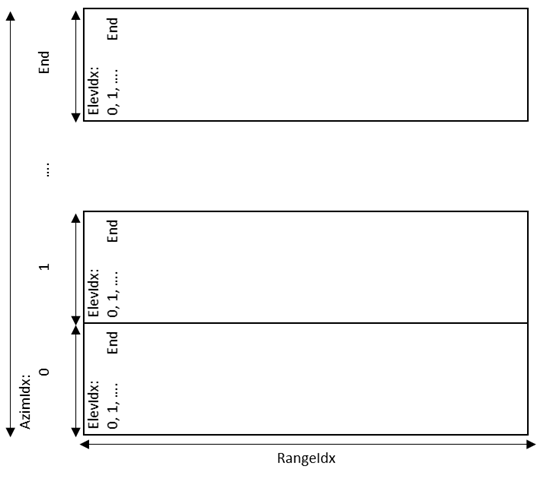
。In "3D_people_counting_demo_implementation_guide" document description(figure 34 in p.51), the data should be arranged in all azimuth indexes then all elevation indexes for following Azimuth-Elevation CFAR detection process:
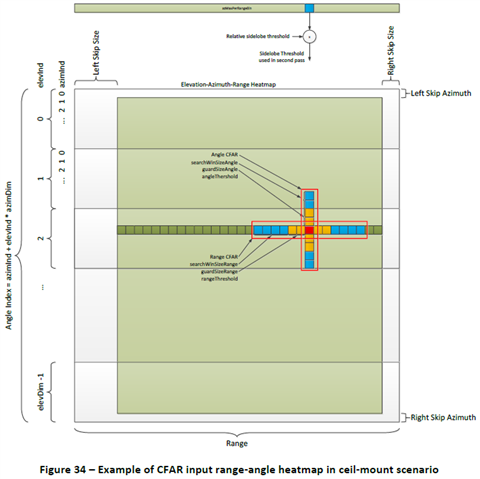
I think both arrangement are quite different, which leads to different CFAR detection results!
Shihyu.