


I've been reading through some of the labs in "mmWave Robotics Labs" and I've noticed that many of them come with the following recommendation:
Before continuing with this lab, users should first run the out of box demo. This will enable users to gain familiarity with the sensor's capabilities as well as the various tools used across all labs in the mmWave Industrial Toolbox.
I've primarily been using the out of box demo binaries, I was curious if there was any reason to use a different one? We're using the radar on mobile robotic platforms where the max range we'd be interested in is 10-20 meters and the max velocity being approximately 2.5-3m/s. I can see there are some robotics labs which suggest a specific binary, for our purposes do we have anything significant to gain using something other than the out of box demo?
Edit: I hadn't previously noticed this figure
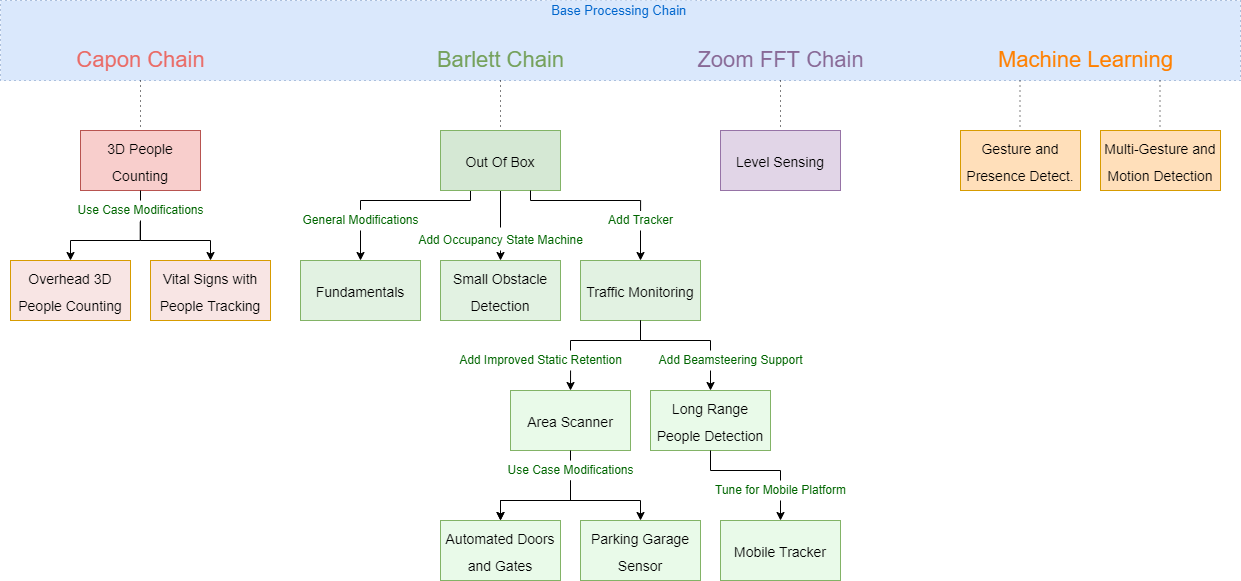
and I suppose I should add that, for my platform, I am interested in the highest quality radar point cloud as I can manage, i.e. reducing noise and ghost points as much as possible. Where I intend to put this data to use by other programs, mainly for mapping and estimation. With that in mind I suppose many of these changes are application specific, and my application just desires low noise/low ghost points and not much else within the operating ranges (i.e. lowest range/doppler resolution possible given the aforementioned max values).


{kind=link}