Other Parts Discussed in Thread: IWR6843AOP
I'm in the process of tuning parameters to improve radar performance, for our application we need low range, high resolution sensing. We're using the IWR6843AOPEVM rev F and the sensor is flashed with the OOB binary (out_of_box_6843_aop.bin) from industrial toolbox 4.12.1. Find the config file at the bottom of this post
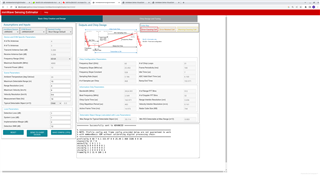
The config file was generated using the ti sensing estimator, starting off with the "short range default" config and setting the following parameters
- max range: 15m
- range resolution: 4cm
- max vel: 9 km/h
- vel res: 0.6 km/h
- rate: 10 Hz
- typical detectable object: child (0.5)
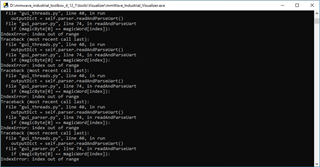
This results in the sensor crashing very soon after loading when using the ti demo visualizer. And w/ the ros node it crashes returning:
Note, the reported values don't agree in frame time with the frameCfg, one says 30Hz and the other says 100Hz

My best guess is its requiring too much either in terms or cube size or processing power, but if that's the case the sensing estimator should warn for this and it doesn't for me.