


Hi Team,
The SMRR was configured according to the parameters of BF mode data collection given by the example code to configure SMRR, anglesToSteer=[-30:2:30]. The generated Rang-Angle Diagrams of the Static Object are correct and are as follows:
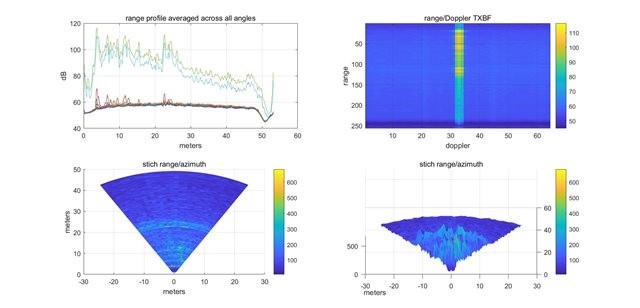
But after I set anglesToSteer=[-60:1:60], the collected data has problems with the ranges under certain BF angles (there were no changes to the environment) as follows:

Such problems emerged as I generated data for several times. Was it because the angle I set was too large? But in the technical handbook, anglesToSteer=[-60:0.5:60]. Or are there any other factors that I must consider?
Best regards,
Katherine
