Other Parts Discussed in Thread: MSP430FR6043
hi:
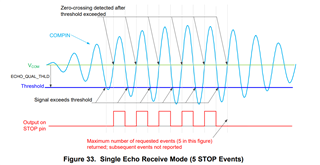
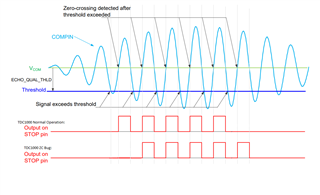
At present, the TDC1000 has wave hopping. That is, after A detector head is sent to B, B detector head is sent to A. During this period, because the threshold value is the same, but the deviation of the echoes received by A and B will cause A and B to switch to different echo pulses, resulting in a difference of N us, commonly known as wave hopping. Is there any way to solve this problem
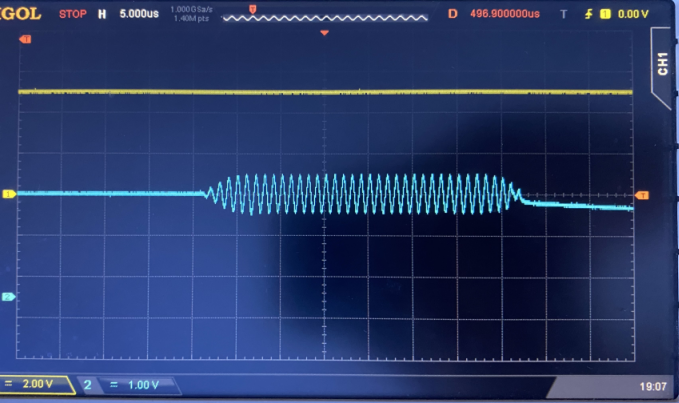
The following blue is the captured COMPIN waveform. It can be seen that the amplitude of the middle waveform is almost equal, so the threshold value can easily switch to pulses at different positions, leading to wave hopping.