Hi Experts,
Seeking your assistance on this query about IWR6843AOPEVM:
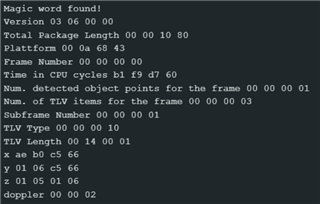
My team is trying to make a (distance to ground measurement thing) and we are using the level sensing demo to get the Data to the UART interface.
My question how I interpret the data from the Uart? (Only the Data port, the Config port is text based).
I assume the port(s) is part of the mmwaveLink protocol, am I correct?
And as a follow up is there a way to send the Data (and / or Config) over SPI/I2C?
Thank you.
Regards,
Archie A.