Other Parts Discussed in Thread: AWR1843
The object has a thickness of 1 cm and an area of 6 x 30 cm^2.

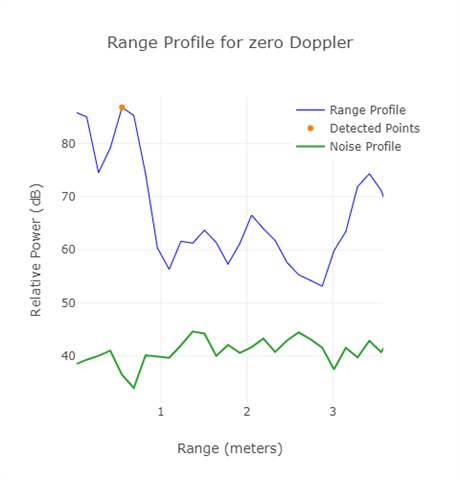
When measuring in mmWave Demo Visualizer, the image looks different when Grouping is disabled and enabled.
Please let me know the reason why multiple is visible when Grouping is disabled.