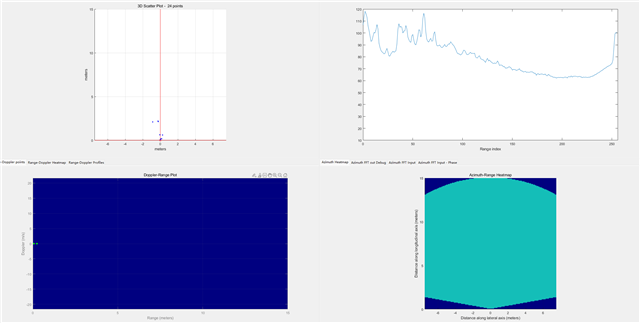
When I use cascade_radar_object_detect usecase in PROCESSOR_SDK_RADAR (V3.8.0.0) to generate the point clouds, it can be found that the number of point clouds is always less than 40.
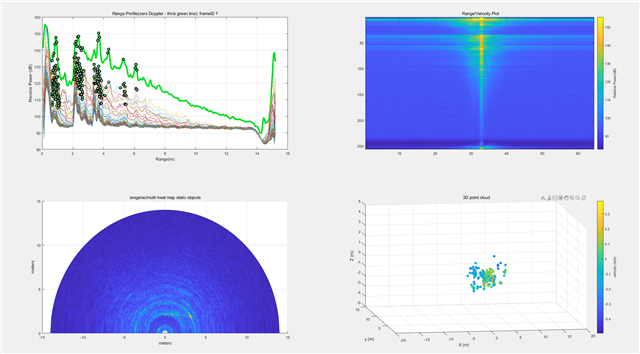
However, when I use mmWave studio to collect raw signals, the number of point clouds generated by MATLAB demo (cascade_MIMO_signalProcessing.m) is mostly greater than 200.
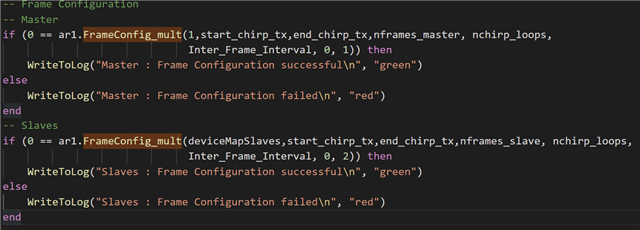
When verifying the point cloud generation results of the two, it is ensured that the configuration of chirp and frame remains the same.
What caused the large gap in the number of point clouds generated by real-time processing and post-processing demo (MIMO)?