Other Parts Discussed in Thread: MMWAVEPOEEVM, MMWAVEICBOOST
Hello everyone,
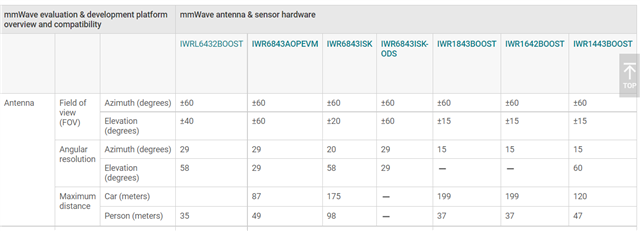
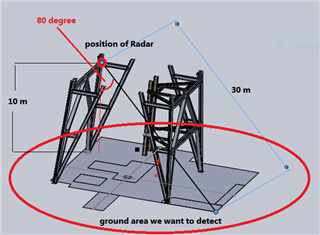
we need to cover an area of 30 meters and position of device should be 10 meters above the ground level with an elevation of 80 degree clockwise . We are developing the same from the IWR6843ISK and we brought two sets of IWR6843ISK, MMWAVEICBOOST and MMWAVEPOEEVM for testing
We have tested multiple people tracking. We got a range of 10m above for a single person, We have tested with changing the state parameters, allocation parameters, gating parameters and sensor position
can you just help us to figure out what parameters should change
Please help us to sort out this. it will be very much appreciated if you help us.
Thanks and regards,
Aleena N A