


Hi Team,
Currently I've adopted the AWR2243 chip cascade scheme. I'm using TDM mode to send waves (8 rounds) to detect vehicle targets on the road. In order to meet the requirements for speed detection, I've used MaxVelocity Extend for speed expansion.
While using it, I found that it wasn't running steadily. Usually, the targets could be detected normally, but the detection effect becomes worse after it ran for dozens of minutes or several hours. Specifically, there were errors in the speed expansion, and there were errors in the speeds and angled detected. It returned to normal after I restarted the RF front-end module using the reset and restart module in mmWaveLink.
This phenomenon lasted for two weeks and would occur 2 to 5 times a day. Is it caused by incorrect use of the chip, or what should I do to locate the issue?
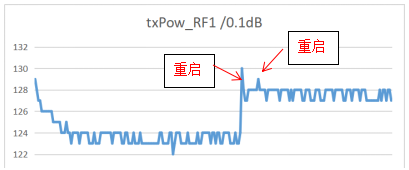
In addition, before and after the error occurred, the monitoring and alarm module was used to monitor the receiving gain and transmitting power at that time, and it was found that these radio frequency indicators were quite different before and after restarting, as shown in the figure below. What does this phenomenon indicate?

No change in temperature before and after restarting.

The receiving gain was higher after restarting.

Transmitting gain became higher after restarting.
Kind regards,
Katherine
