


Hi there,
I'm working on a project that's looking at detecting the velocity of a falling object over about 4m. The overarching question is how to get the best velocity read rate and velocity accuracy of a single target.
This object should be the only moving object in view of the radar unit which should mean that velocity resolution shouldn't be that important (question, I'm not 100% sure about that), it does have a very small RCS (~0.0005m²).
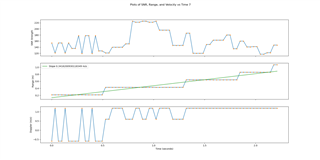
I have been able to see the object but the rate of measurement or the quantisation of the velocity has given me a rougher view of the velocity than I would like.
Related to the overarching question, what does the number of chirp loops variable control? I don't understand this.
Is there a way to control the number of doppler bins? I see a counter for them in the mmWaveSensingEstimator but I'm not sure if this is actually manually adjustable?
I've attached a plot I've produced from my prior testing if this helps with understanding what I mean. I have also attached the .cfg file that I have been using.
4_3_Doppler_dB_down_xwr68xx_profile_2023_01_15T22_29_24_331 - Copy.cfg
Many thanks,
Aston

